Yesterday’s teleconference was accompanied by astounding new
images from above and from Curiosity herself.
The most important for me was the latest HiRISE image from
above as it shows the rover’s recent movements beautifully. You can see the
tracks the wheels have made.
 |
| NASA/JPL/UA |
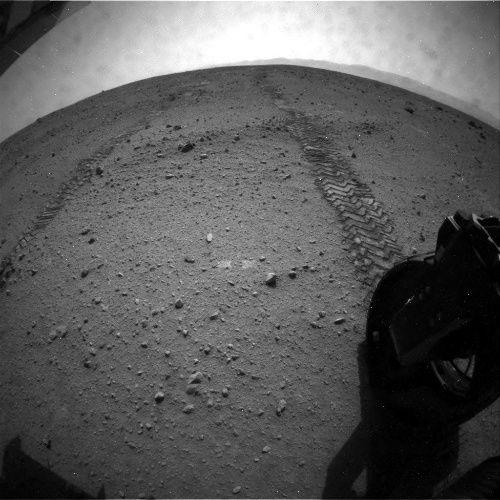
Below is the view looking back towards Bradbury landing from
Curiosity’s position on sol 29.
 |
| Sol 29 view looking back (NASA/JPL-Caltech/mosaic by me) |
The rover has now transitioned to a phase called the ‘Commissioning
Activity Phase 2’ (CAP 2) where they will now begin testing out the 2.1m long
arm and the instruments at the end of it. Previous phases included CAP 1A (which
included activities between landing and the software updating phase on sol 8),
CAP 1B (which included remote sensing instruments like the Mastcams-100 and 34,
the meteorology packages the DANS instrument as well as the laser-shooting
ChemCam). This was all followed up by a period of remote sensing and drives
beginning on sol 22 up to sol 29 which has put’s the odometer at 109m and 82m
away from Bradbury landing.
 |
| NASA/JPL/UA |
You can see the deployed arm below taken on sol 30 by the
navigation camera. The position shown is called the ‘ready out’ position, sort
of like a primer position.
 |
| Like a human arm, Curiosity's has a wrist joint (1), elbow joint (2) and shoulder joints (3), (4). Sol 30 view (NASA/JPL-Caltech) |
Another position is called the drop-off teach points where
they the arm assumes positions worked out while it was still on Earth which
allow disposal of soil or rock core samples into the various internal
laboratories.
Arm deployment and manipulation is tricky so it is important
for the mission team to get a ‘feel’ on how to work with Curiosity. Once that
is done, the science team will be given more power to effect decisions in the
daily arm activities.
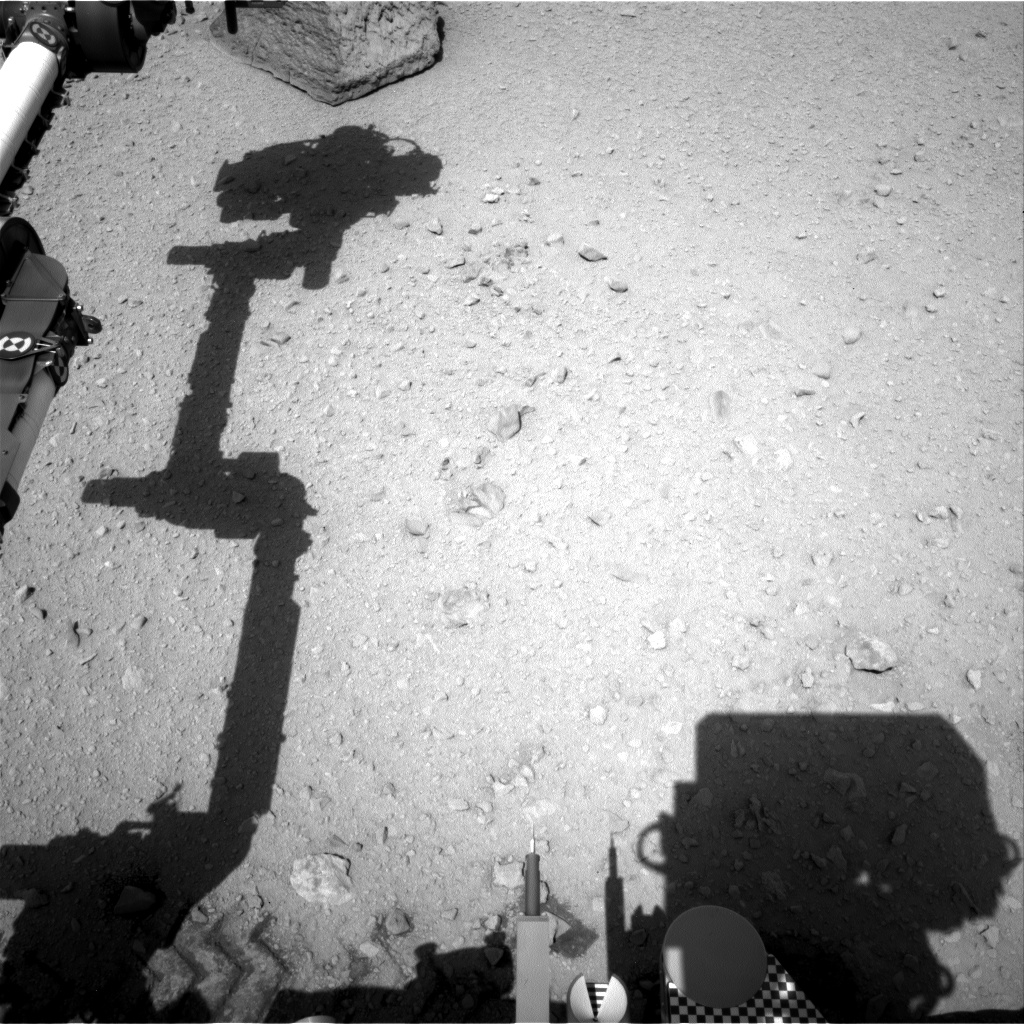
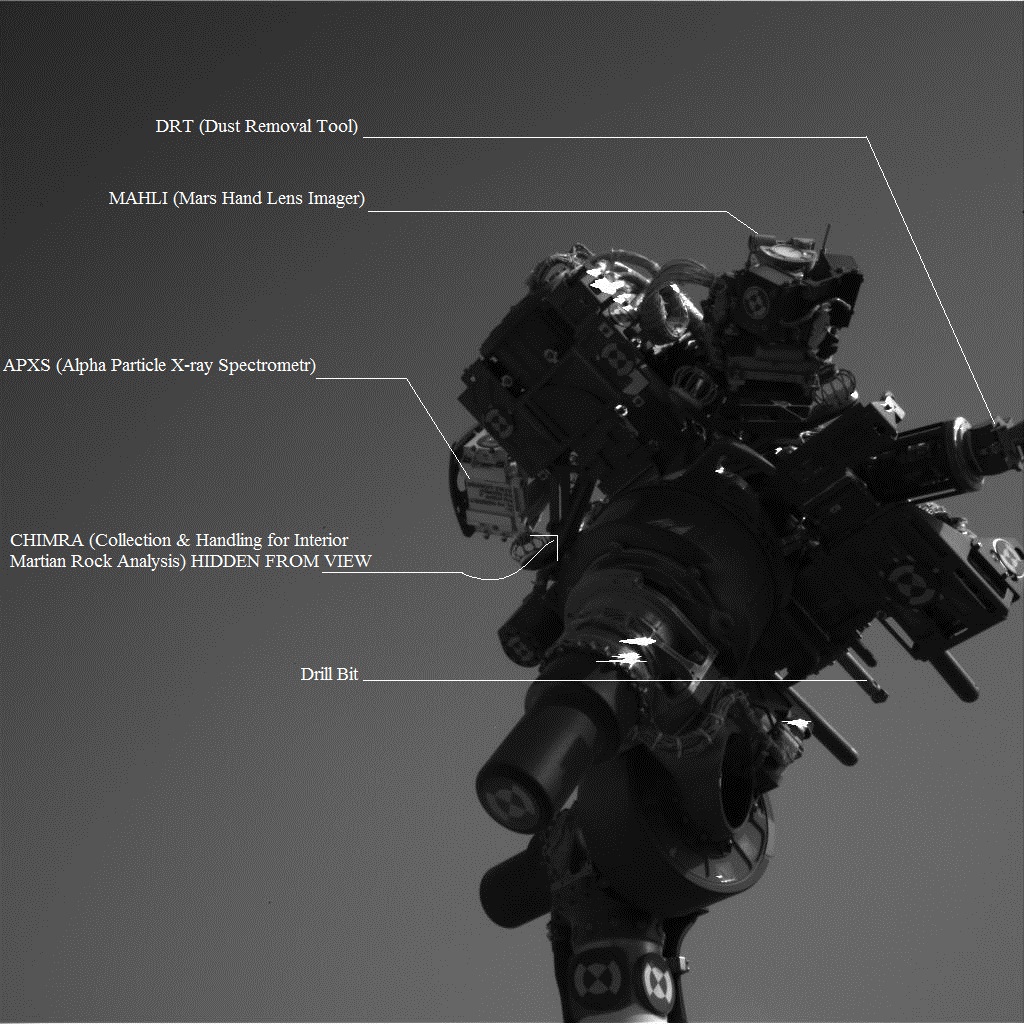
There were some really cool pictures taken of the instrument
turret on sol 30. Below is the first from the navigation cameras while they
were held high in the air, sort of like in will.i.am’s song ‘Reach for the Stars’. I have annotated
the image to show the different instruments on the arm.
 |
| (NASA/JPL-Caltech/annotation by me) |
Below is a color image of the turret from the 34mm mastcam
which is the left eye. It shows the MAHLI instrument which is capable of
imaging objects at infinity all the way to 21mm where it will produce images
with a resolution of 14microns per pixel. The dusty dust cover is still on. The
red circle in the middle of MAHLI’s cover is due to the lens refracting the red
colour of the silicone glue used to hold the instrument’s nine lens elements
and the sapphire window in place. The circular window is around the same
diameter as a bottle cap.
 |
| View of MAHLI (NASA/JPL-Caltech/MSSS) |
MAHLI is scheduled to image the belly of the rover in the
coming days. That is after they okay the retraction of the dust cover that’s
still in the way. MAHLI has a calibration target, a set of colour and mineral standards
set below the shoulder azimuth joint (the joint that turns the whole arm right and left). This target also contains the APXS’s (a
spectrometer that uses an X-ray source to sense chemical elements in situ) calibration target, a piece of
terrestrial volcanic rock called basalt.
In the conference there was a question on the seriousness of
the dents found on the wheels like the right middle one shown below. They were
dismissed as ‘benign’ though they could have been made by anything; during
driving or during landing. The wheels are made of aluminium. It would be
interesting to see how they stand to the driving with time.
 |
| Dents highlighted by white circles (NASA/JPL-Caltech) |
In other news:
Curiosity skipped arm testing on Sol 31 (Sept. 6) after controllers held back on new commanding due to a caution about a temperature reading on the arm. The issue was resolved later in the day, so the planned activities have shifted to Sol 32 (Sept. 7). These include a checkout of the tool turret at the end of the arm and a test using vibration of the sample processing device on the arm.
That sample processing tool is CHIMRA and it will be used to sort out particles by size in the core-powdered and soil samples for read outs by other instruments before depositing it in the sample inlets for the internal labs to analyse.