Curiosity has completed its fourth drive sequence since
landing on August 6. This drive took it 21m further east, bringing it to around
not less than 380m nearer to its destination, Glenegl.
I have managed to produce a panorama using the navigation
camera shots that the rover usually takes after every major drive (in order to
update its position). Its not my best pan job but it serves the purpose of illustration. A good chap from unmannedspaceflight.com has started to
produce kml files showing the position of the rover which we can view on Google
Earth. So we can compare the two views.
 |
| 360 degree view from sol 24. Note the tracks on the left side. (NASA/JPL/Panorama by me) |
 |
| View of trek progress from Google Earth. (Google. Map by Tesheiner from UMSF) |
The total mileage so far should be not less than 43m (that’s
only an estimate as I don’t remember how many metres they drove in the first
drives, only how far they went from Bradbury Landing).
In other news, NASA has released a brand new HiRISE image
from MRO (the telescopic camera in orbit that can see desk-sized objects on the
surface) taken of the rover and its scattered landing hardware and it’s better
than previous images because the angle of roll (the angle between the camera’s
line of sight and the line perpendicular to the surface which would be ‘nadir’)
was only 9 degrees which would improve the imaging quality as your subject isn’t
placed so far away. It also means less of the atmosphere in the way which would
otherwise produce a worse shot with the increased amount of dust in the way.
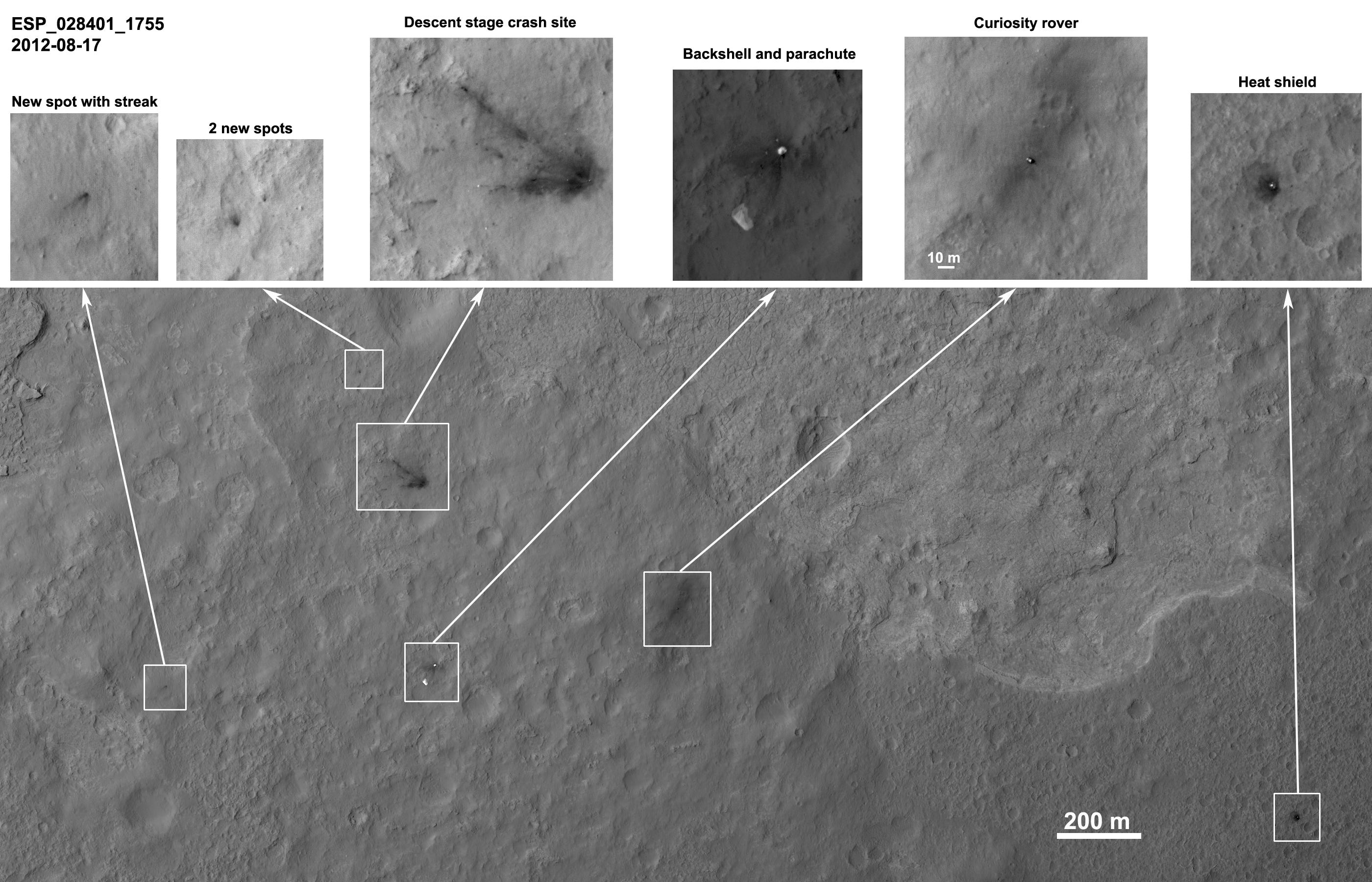 |
| View from HiRISE (NASA/JPL/UA) |
You can see plenty of debris around the rover in exquisite
detail (you can even see, in the ballooned insets, the rover’s wheels, shadow
of its mast and the RTG [radioisotope thermal generator] attached to the back
of the rover).
It’s now approaching evening of sol 25 at the landing site.
Stay tuned.
No comments:
Post a Comment