 |
| Sol 176: Right mastcam eye true colour image showing the three sites where Curiosity tested out its drill (NASA/JPL/MSSS) |
 |
| Sol 174: The first drill operation captured by the right mastcam eye in colour (NASA/JPL/MSSS) |
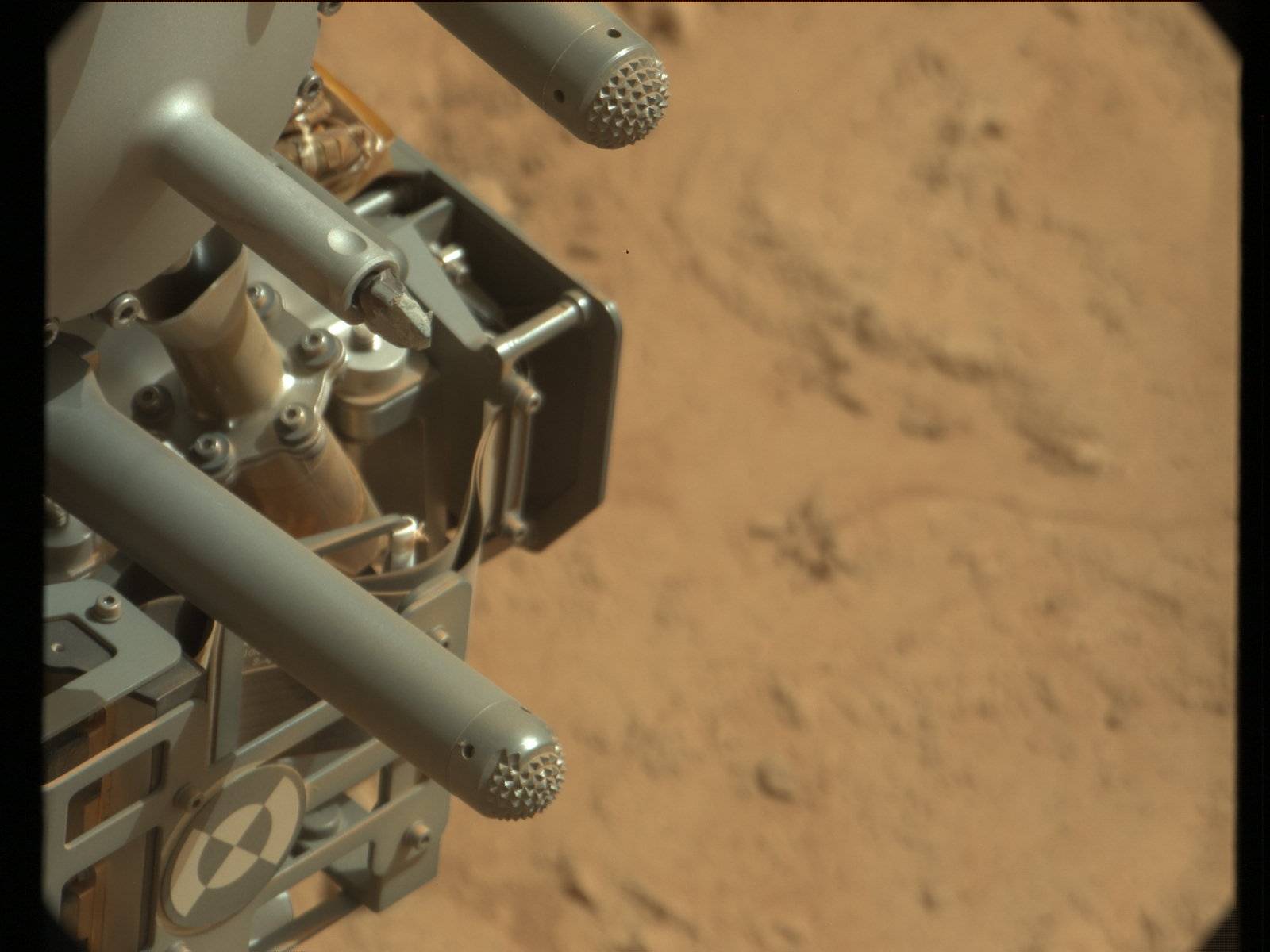
To start with the latter question, the incomplete drilling is all about characterising the behaviour of John Klein when this instrument is used. The samples collected must behave like the soil used previously in the internal analytical experiments; like fine powder. And that's what this current phase of the checkout is supposed to do and from the looks of things, we can say pretty much that may be spot on. As to the question of what forces are we dealing with here, the drill must stay still and stable while doing all this or else all manner of hell can and will ensue. For example, the instrument may fault and get damaged or Curiosity may lose the drilling bit to the rock (although she has spare bits hidden away in the front for the arm to reload when needed). So the stability comes from the force of the arm pressing against the rock itself which may amount to around 30kg worth of force. With the 2 prongs sticking out by the sides of the drill, this provides enough stability for the long list of drillings yet to come. Testing this included some 'preloading' tests where the arm was positioned and repositioned in different locations on the rock to see if the weighty force doesn't do anything unexpected.
 |
| Sol 170: Fron hazard camera animation showing the pre-load test in action (NASA/JPL/animation by Abraham Samma) |
In order to place and hold these turret-mounted devices on rock and soil targets, the current design of the RA is capable of exerting large forces between the turret-mounted hardware and the rock or soil surface. In particular, these large forces are required to stabilize the drill against a rock target in order to keep the device from “walking” across the surface of a rock when first engaging the rock surface with the cutting bit. The RA achieves this function by first placing the drill against the rock surface and then “overdriving” the actuators so that the entire system winds up against the overall stiffness of the RA. The sizing of the RA actuators allows this mechanism to produce more than 240 N at the tip of the arm in certain arm configurations
 |
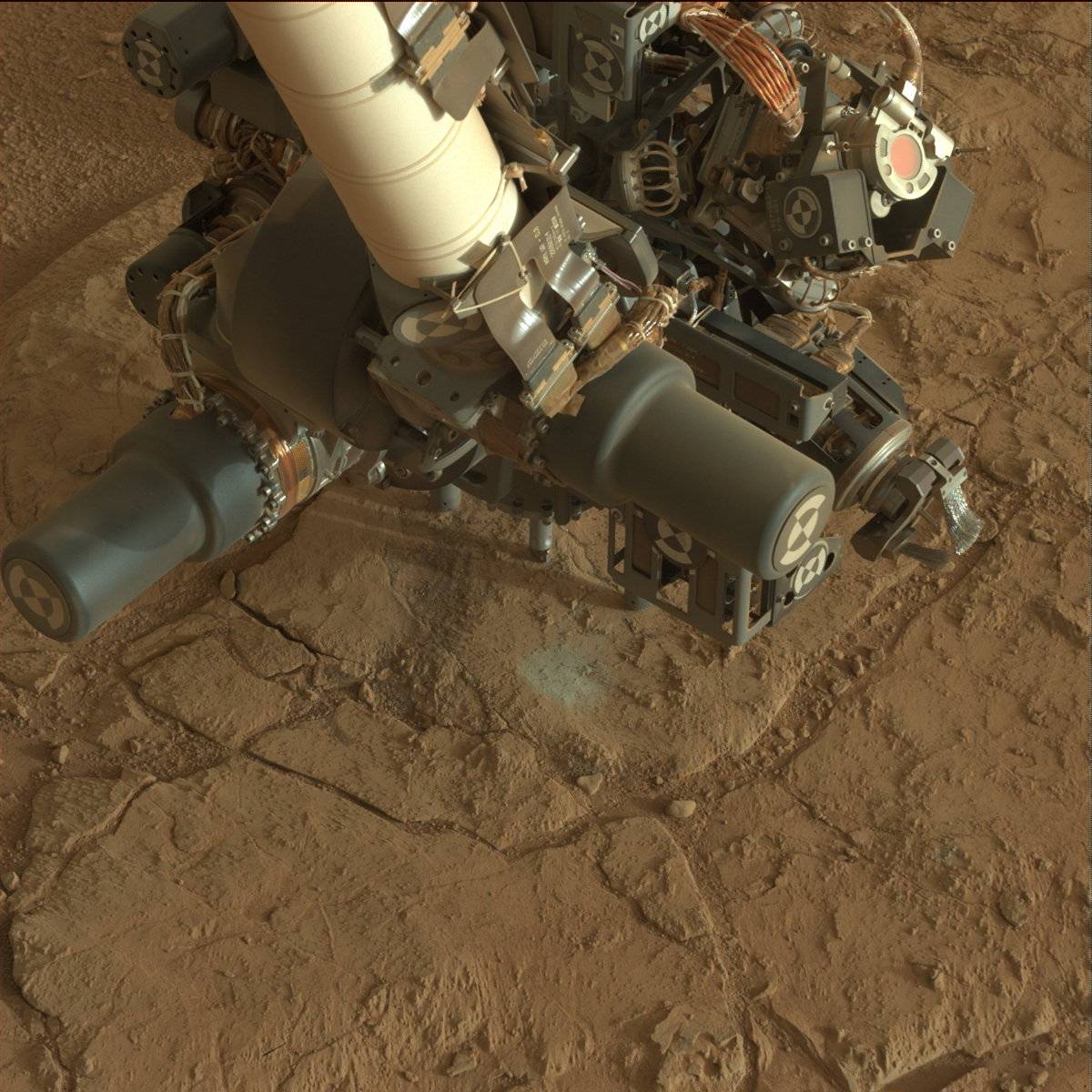
| Sol 176: Inspecting the drill bit after the day's test. (NASA/JPL/MSSS) |
 |
| Sol 176: the chink into John Klein viewed close-up by MAHLI. Notice the white vein of gypsum to the left. (NASA/JPL/MSSS) |
No comments:
Post a Comment