This is not one of my best posts (its rather restricting to blog on a phone) but I couldn't resist mentioning this video posted by jpl recently that gives us a good outline about where the rover is heading to in order to get to Ares Mons aka Mount Sharp. There is a lot of interesting terrain ahead so I think we can expect a lot from this long road trip. As mentioned in the video, Curiosity will reach the base of the mountain somewhere in he middle of next year. So get comfortable, this is going to be a long haul.
Thursday, November 14, 2013
Sunday, October 27, 2013
Note to Readers
Because I have now started clinical rotations for this academic year, the number of posts I can write will consequently be curtailed and even irregular in frequency. I thank my readers for their support in making this project worth the effort. Please continue to visit and you can keep track by bookmarking or using your favourite RSS application. Since Curiosity is mostly doing long drives at the moment, I do not expect much in terms of significant updates in the immediate future except for research news and the like. Looking forward to reaching Mount Sharp!
Saturday, September 21, 2013
Sol 399: Science Stop over
Since my last post (sol 371), Curiosity has travelled more than 500m, bringing it to the first designated 'waypoint' on the road to Mount Sharp's base. It has been more than three weeks of almost non-stop long drives thanks to the rover's AutoNav system (activated in August last month) which allows the rover to generate 'terrain meshes' and depth maps (with the help of its stereoscopic navigation cameras) of the area in front of it and then use that information to guide itself around hazards. This helps the rover to navigate herself even to areas have not been scrutinised by human drive planners. That's the feature in this week's edition of the Curiosity rover report video which does a pretty good job of explaining the whole shebang:
The result; drives that sometimes go beyond the 100m mark (the longest was on sol 385 when the rover drove 141m), allowing a lot terrain to be covered. Compared to previous generations of Mars rovers like Spirit and Opportunity, Curiosity is a speed demon. That drive put the rover on top of a small rise dubbed 'Panorama point', still 75m from the first major stop over point in the trek.
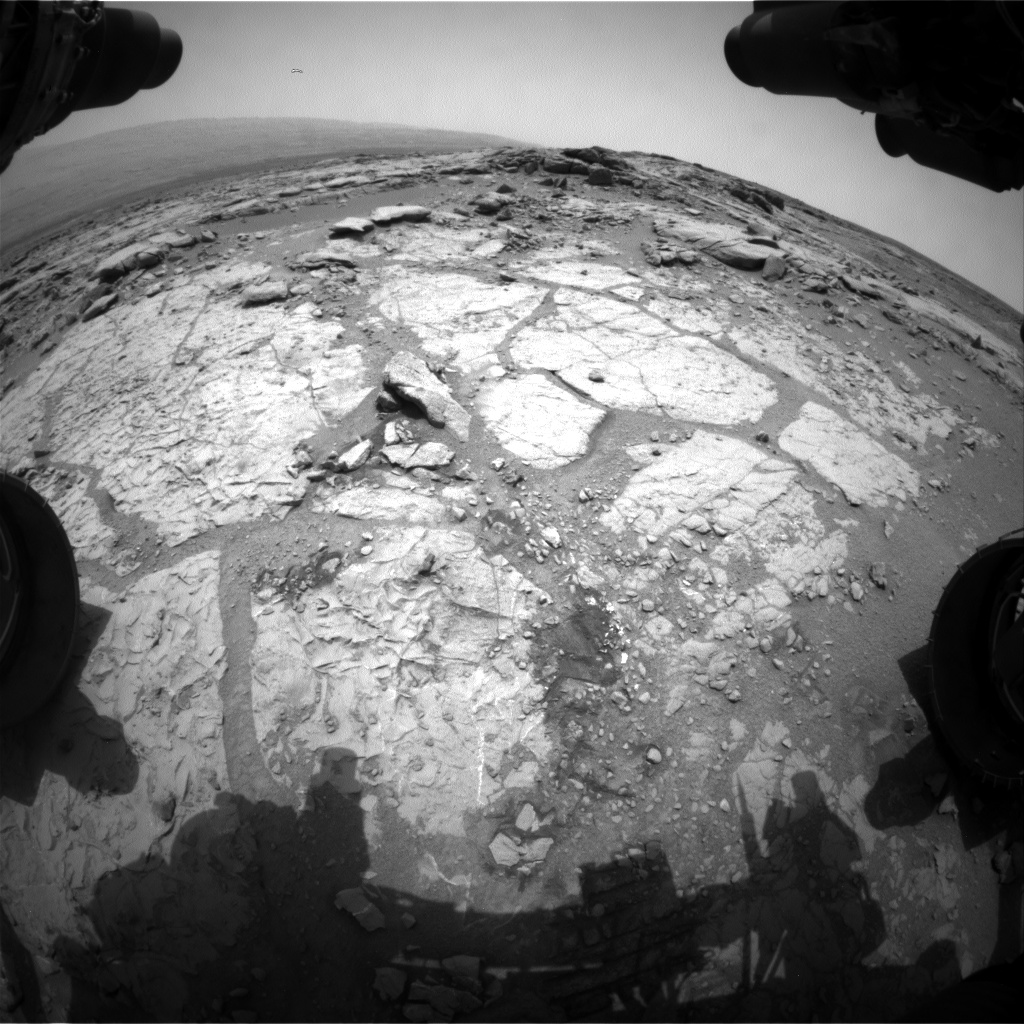
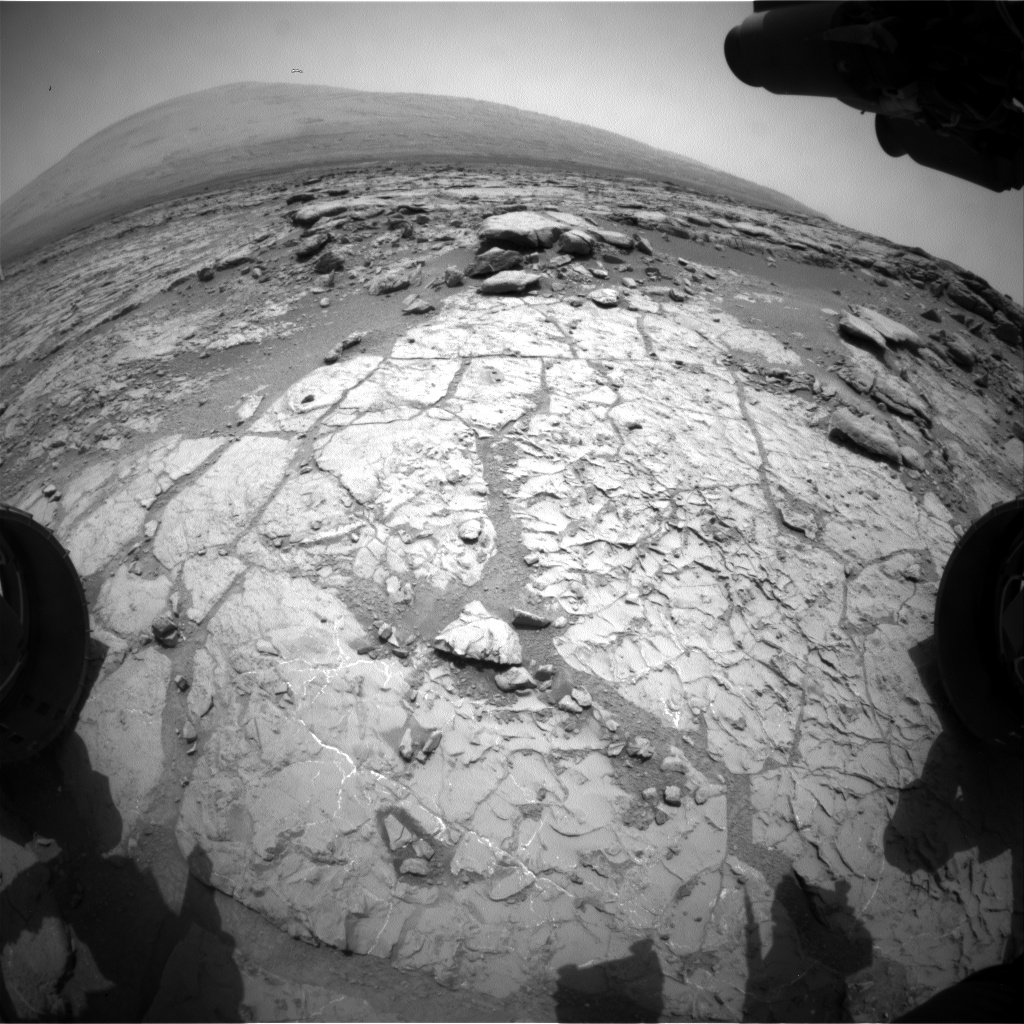
The rover arrived at that point dubbed 'Waypoint 1' on sol 390 and a short bump was made on sol 392 and 396 to position Curiosity for contact science on the outcrop dubbed 'Darwin'. Observations with MAHLI and APXS were conducted on 5 different targets at Darwin and more will be done soon as well as plenty of remote sensing with the Mastcam and ChemCam instruments.
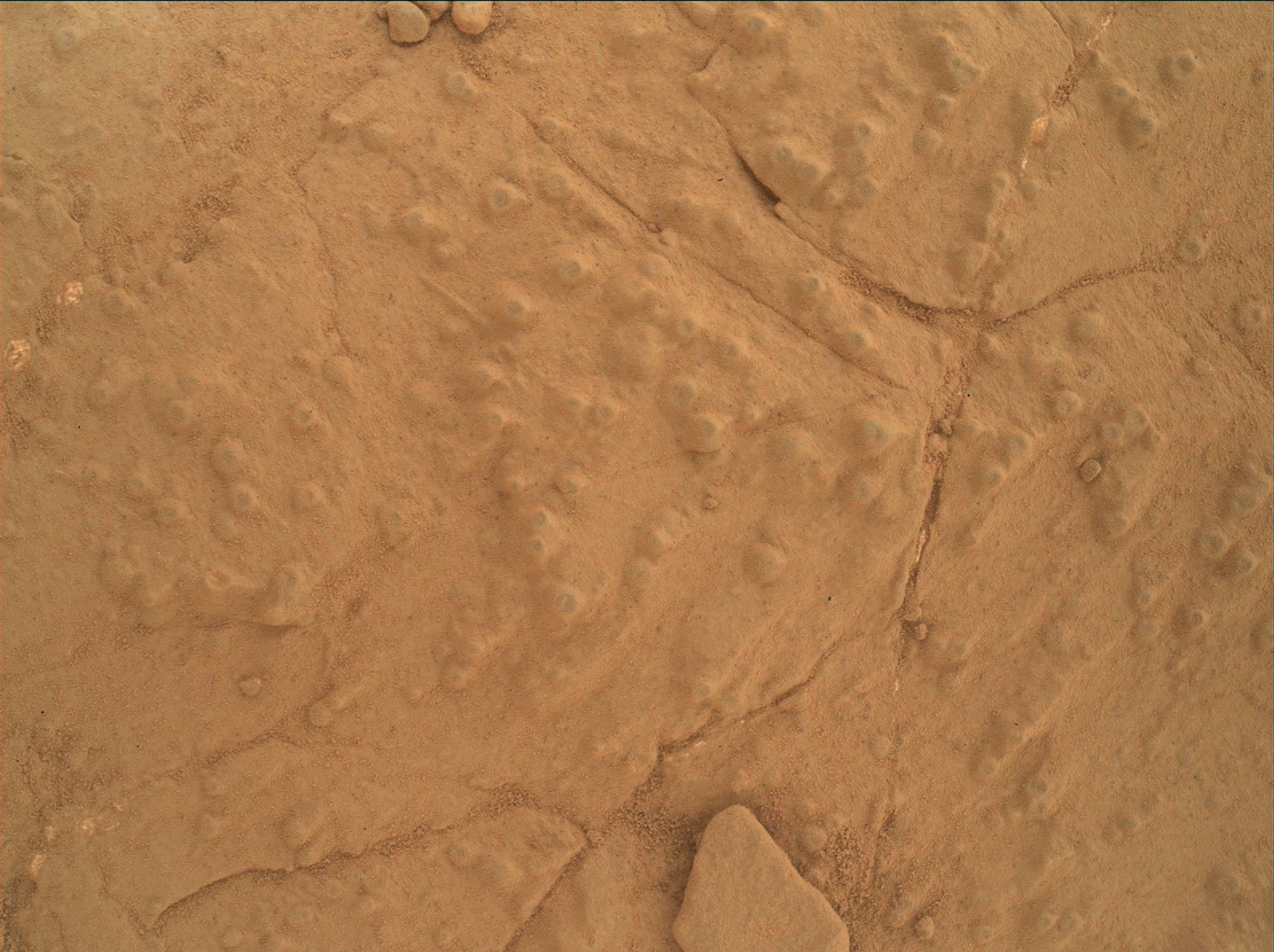
Darwin is certainly an interesting place as evidenced by this Mastcam view showing what appears to be mineral veins; these are quite common back at the Glenelg area and hint at yet more evidence of past hydrological activity. We'll probably be here for a sometime before its back to driving.

Postscript note:
During the execution of blind observations (science activities that the rover team programs without knowing precisely the state of the vehicle after a drive, in this case, the sol 396 drive) ChemCam and the Mastcam made observations of the Andromeda galaxy and the star Sirius at the night to test out the instruments in preparation of observing the comet ISON which is fast approaching the inner solar system for a late year spectacle (that's IF it turns out to be rich in icy materials to form an appreciable coma and tail). That was on sol 397. I scoured the images and found one left eye view of Sirius. Andromeda might have been too dim for the cameras to capture.
The result; drives that sometimes go beyond the 100m mark (the longest was on sol 385 when the rover drove 141m), allowing a lot terrain to be covered. Compared to previous generations of Mars rovers like Spirit and Opportunity, Curiosity is a speed demon. That drive put the rover on top of a small rise dubbed 'Panorama point', still 75m from the first major stop over point in the trek.
 |
| A navigation camera mosaic showing a view of Waypoint 1 from the top of Panorama point. The outcrop 'Darwin' can be seen in the upper centre of the mosaic as a relatively paler patch of rock (NASA/JPL-Caltech) |
Darwin is certainly an interesting place as evidenced by this Mastcam view showing what appears to be mineral veins; these are quite common back at the Glenelg area and hint at yet more evidence of past hydrological activity. We'll probably be here for a sometime before its back to driving.
Postscript note:
During the execution of blind observations (science activities that the rover team programs without knowing precisely the state of the vehicle after a drive, in this case, the sol 396 drive) ChemCam and the Mastcam made observations of the Andromeda galaxy and the star Sirius at the night to test out the instruments in preparation of observing the comet ISON which is fast approaching the inner solar system for a late year spectacle (that's IF it turns out to be rich in icy materials to form an appreciable coma and tail). That was on sol 397. I scoured the images and found one left eye view of Sirius. Andromeda might have been too dim for the cameras to capture.
 |
| This image was taken by the Mastcam's left eye and shows the star Sirius as a white line pointing diagonally near the centre. The appearance is due to the exposure time needed to get the image which caused the camera to capture the star's changing position due to Mars' rotation. The other white lines and dots are just noise called hot pixels. They usually register in CCD cameras images taken in dim lighting. (NASA/JPL/MSSS) |
Friday, August 23, 2013
Sol 371: Driving Record and New outcrops
Curiosity has completed a record drive on sol 371 with a single drive totalling 110m, the longest ever single distance drive in the mission. The reason for these long drives is because the rover team can now see further than usual because of the nature of the terrain. This allows them to plan more ambitious drives.
Meanwhile the rover stumbled upon an interesting outcrop (sol 370) though that will not stop her from planning even longer drives as soon as possible.
You can get a sense of the new terrain (which should be continuous with the top layers of rocks back in Glenelg) in this b/w navigational image taken on sol 371:
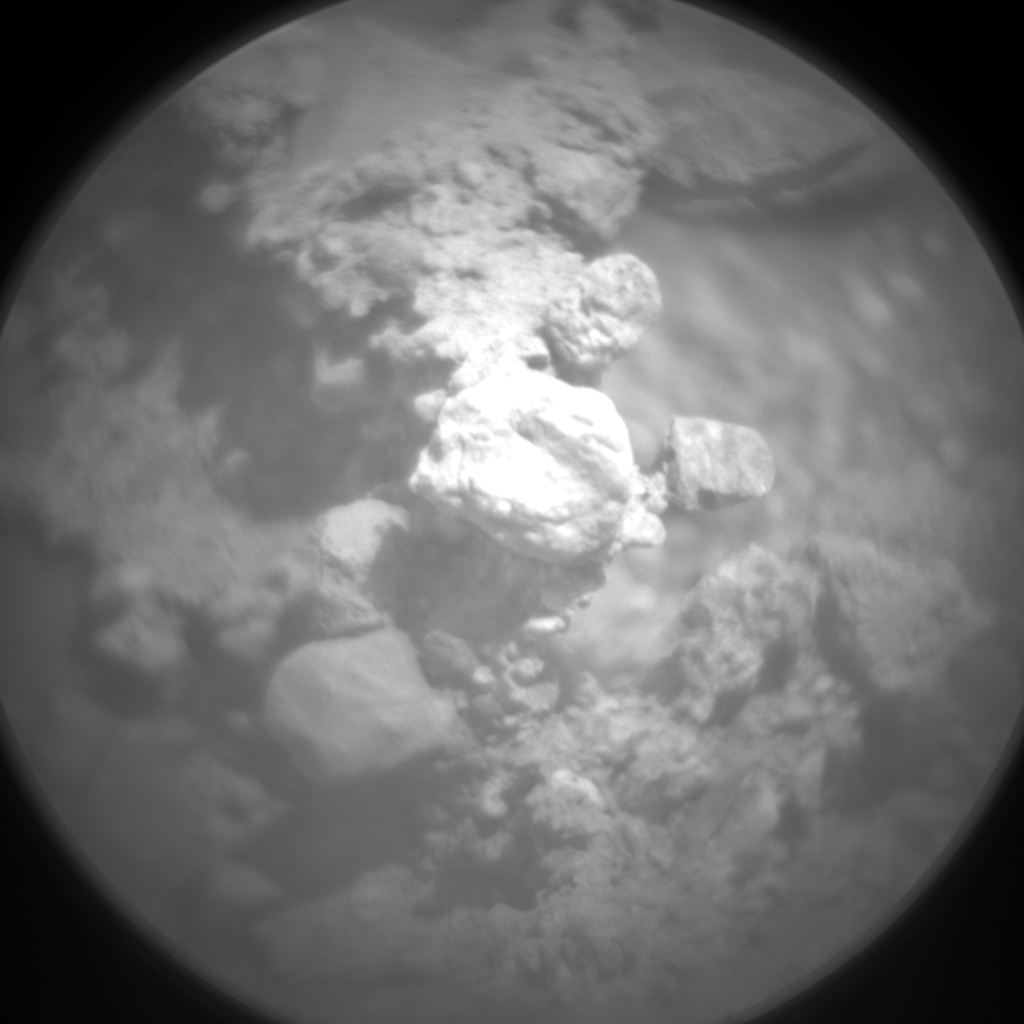
Judging from the images from the laser-camera combo instrument ChemCam, these rocks could be water related as you can see the rounded pebbles like in this ChemCam image taken on sol 370:
The rounded surface of larger pebbles implies water and not wind (which can't easily transport and therefore smoothen larger pebbles) as the agent that eroded them while being transported in a stream.
Meanwhile the rover stumbled upon an interesting outcrop (sol 370) though that will not stop her from planning even longer drives as soon as possible.
 |
| The new outcrop looks like it is made up of course particles cemented together just like the ones at Glenelg. (NASA/JPL/MSSS) |
 |
| Sol 371 mosaic showing the extent of the new outcrop (NASA/JPL/MSSS/Abraham Samma) |
 |
| ChemCam shot of a target within the outcrop. The camera is designed to magnify laser target areas millimetres across. Notice the rounded particulates some held precariously by cementing material like the one on the right of the centre (NASA/JPL/LANL) |
Tuesday, August 20, 2013
Alluring Martian Moons
I thought of writing only about the moons of Mars today so here goes:
One of the most enchanting things about Mars is its
contradictory mix of alien qualities combined with aspects that make the planet
more earth-like than any other body in the solar system. It has a sky that’s pink
instead of blue, polar caps made of a combination of frozen carbon dioxide and
water rather than just water ice and it has natural satellites, two of them,
called Phobos (meaning ‘fear’ in greek) and Deimos (which means ‘terror’),
appropriate companions for a planet named after the Roman god of war.
Phobos was discovered in 1877 by Asaph Hall, an American astronomy. He also discovered Deimos a few days ago the same year.Phobos is the bigger of the two with dimensions spanning
28 km by 20 km. Deimos measures 16 km by 12 km, almost half of Phobos’ size. From the
surface they appear to move across the Martian night sky in opposite directions;
Phobos rises from the west and sets in the east while Deimos does otherwise. This can be accounted for when one
considers their orbital periods, i.e. the time it takes for a revolving body to
complete a full circle around a point of focus.
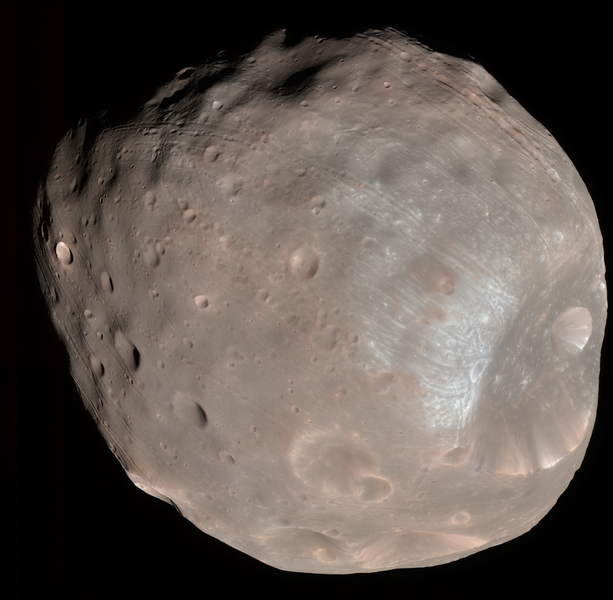 |
| Phobos in false colour by Mars Reconnaissance Orbiter in 2008. Notice the 'big hole' to the right called Stickney and the the strange grooves leading out of it (NASA/JPL//MSSS/UA) |
By Kepler's third law of planetary motion, we expect the period of orbiting bodies to increase with their distance from the foci. Phobos, orbiting closest to Mars (approx 9300 km), circles Mars once every 7.7 hours. This means that
essentially Mars (which rotates around its axis every 24.6hours) is essentially
playing catch up with its moon. So, instead of the moon appearing to rise and
set from east to west like things here on Earth (which move slower than the
Earth across the sky) it appears to rise from the west and set in the east.
This is similar to what you would see along the highway. When you pass a slower
car at high speed, he appears to be moving backwards. An overtaking Formula One
race car would appear to be moving forwards, leaving you in the dust! It’s all
relative motion. Taking all this we see that an observer on Mars would see
Phobos rise and set every 11 hours roughly. For Deimos (lying almost 23,460km away from Mars) with its orbital period
of 30.3hours, you would see it in the Martain sky every 5.45days roughly.
 |
| The 'moon movie' from Curiosity clearly shows the relative opposing motions of the two moons. Notice Stickney crater in the leading edge of Phobos (NASA/JPL/MSSS) |
Phobos’
surface features are more prominent and diverse in nature than that of Deimos
whose features appear softer. The most prominent feature on Phobos is the massive Stickney
crater (named by the International Astronomical Union after Asaph Hall’s wife),
measuring 9 km in diameter. Strange grooves that resemble a spider’s legs appear
to radiate from the crater. It is still unclear how these lines actually formed
but two schools of thinking suggest that they’re cracks that could have formed
as a result of the impact that formed Stickney in the first place (which being
half the size of Phobos implies a massive event that could have ripped the moon
apart) or they may be a result of the debris that was flung from the impact sit
landing back onto the surface and producing chains of craters that coalesced
into grooves. The interesting thing about these grooves which measure hundreds
of metres across and tens of metres deep is that they don't quite seem to
radiate perfectly from the crater itself and new data from the European orbiter
Mars Express suggest that the impact ‘cracks’ scenario may not be as correct as
first impressions suggested and that the grooves are actually independent of the Stickney crater information. They are indeed are result of falling back of impact debris but not necessarily from the impact that caused Stickney.
 |
| A good relief view of the grooves of Phobos(Commons) |
Deimos is an interesting body in that it doesn’t sport as
much features as its bigger counterpart. In fact it only has 2 officially named
surface features; Swift and Voltaire, Deimos’ two of the moon's larger craters measuring 1km and 1.9km respectively in diameter named after writers who wrote about the moon more than a hundred years before its discovery. The subdued appearance of the surface features suggests a
thick layer of powdered regolith covering most of the surface.
 |
| Deimos in false colour courtesy of MRO. The two faint craters that form an unsymmetrical figure 8 to the lower left are Swift and Voltaire (NASA/JPL/MSSS/UA) |
The composition of the two moons resembles that of some
classes of asteroids, rocks that failed to form planets during the formation of
the solar system 4.6 billion years ago. Phobos and Deimos’ compositions resemble
a class called C-type (classes are determined according to the spectral
signature of the asteroids i.e. the amount of light reflected by these objects
at different wavelengths) the most common of types. These are dark,
carbonaceous bodies with poor reflectance and very little minerals. Some
suggestions indicate a relationship with D-type which features a reddish
colouration and maybe organic compounds and water. Very little hydration has
been detected on surface of these moons but there may be some water ice under
all that layer of regolith. The relatively low densities of the moon (2000 kg/m^3 for Phobos and 1000 kg/m^3 for Deimos) suggest some form of porosity in the bodies, i.e. they're literally space fluff; rocks that have not quite come together to form a thorough solid body.
Their similarities to asteroid classes and their general
appearance suggest that they are indeed captured asteroids that somehow got
trapped in Mars’s gravitational well, perhaps with a little help from an
ancient thicker atmosphere that helped slow these bodies down to their present
orbits. The near circular, near-zero inclinations of the orbits however suggest
the capture theory for the formation of the Martian moons may not be adequately
explanatory. Capture should result in an elliptical orbit, not near perfect
circles. In short, we still have a lot to learn about these two small moons.
So far we have only had flybys of these moons with Mars orbiting
spacecrafts like Mariner 9, the Viking series in the 1970/80s, the Mars Global Surveyor,
Mars Express and the latest Mars Reconnaissance Orbiter. Russia did try to send 3 orbiter and landing mission to Phobos; Phobos 1 and 2 and the recent Phobos-Grunt in 2011. The first two were launched in the 1980s and Phobos 1 failed en route, Phobos 2 got near enough to get pics but also failed and Phobos-Grunt failed to get beyond Earth orbit and burned up during reentry in January 2012.
It would have been wonderful to have a spacecraft studying this moon, both
believed to contain details about the old nebula cloud from which our solar system
emerged. Other missions are on the drawing boards including an American candidate called Phobos Surveyor.
So the Martian moons continue to beckon us on! Until then, it is up to the current orbiters and rovers to survey these forgotten rocks whenever they have time. The recent observations made by Curiosity will be used to improve our understanding of the orbital mechanics of these moons in order to continue to predict their future movements with great(er) accuracy.
Saturday, August 17, 2013
Sol 365: Steady driving
Curiosity is steadily making its way towards Mount Sharp and so far she's making good time and just like that the 2km mark is just metres away as of sol 365.
This calls for a colour panorama!
 |
| A 360 degree partial true colour panorama shot by the rover's Mastcam (left eye)on sol 364. (NASA/JPL/MSSS/Panorama by Abraham Samma) |
Besides showing a gorgeous view of the mount and the faraway walls of Gale carter there are also some subtle but interesting features present in this seemingly monotonous view. If you look carefully on the right side of the panorama, you'll notice a conspicuous pile of black basaltic boulders (rocks of volcanic origin). The boulders appear to sit on a mound which might suggest an eroded intrusive volcanic feature like a dike though like I've said many times before, I'm not a geologist (professional anyway)! Earth has plenty of such features too so these are typical to both planets. Whatever they are they warranted more remote sensing by the rover which I've stitched accordingly. This shot was made the next sol before the rover drove around 26m more:
| Sol 365 shot of the boulder mound with the right eye of the Mastcam (NASA/JPL/MSSS/mosaic by Abraham Samma) |
The same could be said for the one next to the rover's tracks to the left of the first panorama and many other similar sites around the area which are revealed beautifully in the HiRise map.
That's it for this update. Just incase you haven't seen, check out this beautiful gif animation made from images captured on the night of sol 351. It shows the moon Phobos (the largest of Mars' two moons) crossing and eclipsing Deimos (the smaller of the two) for a few seconds. Beautiful! I'd like to write more about these two moons later as there is so much to talk about these two enchanting bodies than can be said in this brief update.
 |
| The entire passage took 55 seconds (NASA/JPL/MSSS) |
Until then, stay curious!
Tuesday, August 6, 2013
Sol 355: ONE YEAR ON MARS!
It has been almost one year since an object from Earth came
streaking down the beige Martian sky to begin one of the most unique and iconic
surface mission ever undertaken by a human-built probe on the surface of Mars.
Already Curiosity has forced textbooks to be changed as the mission’s vast
array of scientific instruments (few of which have never been used on another
planet before) uncovers more and more information about this red planet’s
environment, past present and also laying the foundations for an eventual
human-led expedition.
To celebrate this occasion, NASA has put together some interesting multimedia on the mission website as well
as a useful infograph that summarise the main discoveries made by the rover during
its time here.
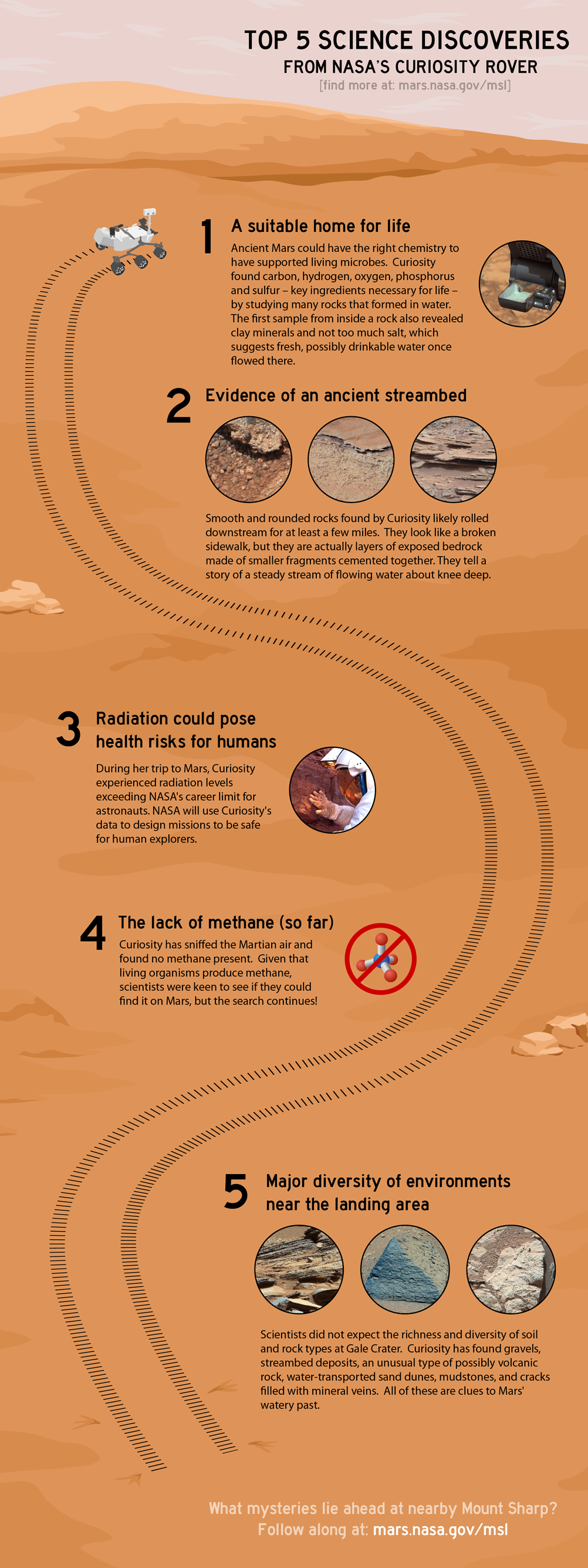 |
| An infograph that summarises all of Curiosity's discoveries to date (NASA/JPL) |
And just in time for the celebrations, we have here a nifty
image sent down by the rover on the 1st of August this year, showing
the two moons of Mars, Phobos and Deimos in a single shot, a mission first. The
image was originally spotted by blogger extraordinaire Emily Lakdawalla of the Planetary Society.
 |
| This image was taken at night by Curiosity on sol 351. You can clearly see the potato-like ruggedness of big Phobos to the left and little Deimos to the right (NASA/JPL/MSSS) |
I originally wanted to post this yesterday but I missed because my internet connection was down. Now I'm glad that I didn't post otherwise I would have missed this really brilliant video. It shows the flight spare of the SAM instrument on Earth being programmed to sing Happy Birthday to Curiosity! Well not exactly sing rather it is vibrating at certain frequencies that our brain interprets as a Happy Birthday jig. Its pretty awesome to watch and listen. The vibrations serve to nudge samples along the way in the many pipes and chambers inside the instrument.
This mission is just now ready to crank the gears up a
notch. Curiosity is fast on its way to the ingress point south east of its
position where it will start trudging Mount Sharp’s lower slopes and sampling
ancient rock dating back more than 3 billion years ago. This was during a time
of Mars’ geological history dubbed the Noachian era when the planet’s
environment evidently could support liquid water in great amounts on the
surface and the atmosphere was thick enough to prevent this water from boiling
away. Whether life could be supported or was ever supported is another question
entirely, one that may never be answered fully by Curiosity given the aim of
the mission and the range of its instruments. Such questions can only be
answered scientifically when we have a sample of Mars in our labs here on
Earth. This would require a sample return mission and there a number of
proposals on the drawing boards seeking funding and the next Martian rover in
2020 will be a part of that future effort in one way or another. Other
countries and organisations like Europe’s European Space Agency, India’s Indian
Space and Agency, Russia and China are all seeking to expand their Mars
exploration programs one way or another.
 |
| A model of the coming Indian Mars Orbiter, the Mangalyaan or 'Mars-craft' in Hindi (photo by: Arunangsu Roy Chowdhury) |
Despite the undeniable scent of presence national
competition and pride amongst these efforts, there is a universal scientific
rallying to know this planet better which helps the unify humans and overcome
national boundaries if only a little. Mars exploration is important to us and
Curiosity is just the beginning of a global
wave of missions that are soon to be.
wave of missions that are soon to be.
WHY ARE WE HERE?
This is what I want to reflect on today; what
are we doing here? Why are we spending all this dough on these cool machines to
send home fantastic vistas of faraway worlds? How do we convince the most
demanding of auditors, i.e. the ordinary citizen, that space exploration and
fundamental scientific research is as important as fighting poverty and world
hunger? Immediate benefits are not apparent in some sciences such as astronomy
and pure mathematics so why do we have to give damn?
In 1970, Sister Mary Jucunda, a nun based in Zambia, decided
to write to a man named Dr. Ernst Stuhlinger who was at the time associate
director of science at NASA’s Marshall Space Flight Centre. It was just within
a year after America’s successful landing of men on the moon and the Apollo
program that did it was well under way in sending more expeditions to the moon.
Hence the nun’s letter was well justified both in the reason and time. In it
she asked Dr. Stuhlinger how he could suggest spending billions of dollars on
such projects at a time when so many children were starving on Earth. The
thoughtful doctor did reply and today we can read his succinct explanation to the nun here. I believe that his reply still holds
water in our post-cold war era. In any case his logic may be exactly what we
need to overcome so many challenges today. I encourage readers to visit the given link to read the letter. Its a bit long but I don't think we should expect anything less for a question that touches on such important issues.
There is a reason why this era is called the era of
Information. It is fundamental research and development that which is powering everything from our national
economies to our food production (crops today are far more resilient thanks to
advances in genetics) to the very way we learn, treat diseases and coordinate
massive humanitarian interventions. It may be very hard to believe that our
humble rover Curiosity is part of that wave of new knowledge but in actual fact
she is! Here analytical instruments, the CheMin and SAM, are revolutionary
because they have been ingeniously miniaturised to fit into the rover’s body
and still produce high quality data rivalling their bigger cousins that reside
in terrestrial laboratories. Curiosity is a technological feat whose advances
will continue to echo well into the future of humanity, long after she
completes her mission at Gale crater.
The age of discovery never started with the European
conquest of the world nor has it ever ended. It all began when a certain being
who walked on two legs and lived in Africa decided in his heart there is
something over the hill that’s better than what is here and that we must walk
in that direction to find it. We are still walking that walk up to today and we
will continue that walk until we, as the poet T.S. Eliot put it, “...arrive
where we started and know the place for the first time.”
Meanwhile our rover continues on its way to Mount Sharp in
earnest. What we will see at the end of this spurt I cannot say nor can anyone
else. But what I’m pretty sure about is that I’ll be there to see it when it
comes and I hope you too dear readers will be there too, waiting to see what
lies over the distant hills like our ancient ancestors.
Stay curious!
 |
| Panoramic view from Curiosity on sol 354. A lonely sand drift can be seen in the foreground near centre. Currently the rover has completed over a mile of roving. (NASA/JPL/Panorama by Abraham Samma) |
Monday, July 15, 2013
Sol 333: The One Kilometre Milestone
Since sol 329, Curiosity has driven an additional 44m approximately. That means it is now only a few metres away from hitting 1km of total distance covered for the first time in the mission. This is obviously an important milestone for a rover thats designed to go much further than any rover has gone before it. And the view is awesome as usual.
Looking at the panorama above and the map below, I estimated the sol 333 location as the place marked by a large white dot. We're on a south-west course heading straight for the ingress point. Can you match some of the features in the map to what you see in the panorama above?
 |
| Sol 333 view after a 16m drive. Click for full size. (NASA/JPL/Abraham Samma) |
 |
| NASA/JPL/UA/annotation by me |
Saturday, July 13, 2013
Sol 332: Mount Sharp post haste
The rover's making extremely good progress towards the base of Mount Sharp. The strategy right now is to use a dune free area west of the rover's position which lies around 8 km away. Sprinting at least 20 m/day will get us to the 'ingress point' in around 400 days time. Plenty of time to allow us to soak in the ever changing scene as we make our way west.
To get out of the Glenelg quickly, the rover team employed the same route used to get into the area in November last year. And speaking of changing scenes, the rover has engaged in recent imaging with its MARDI image which hasn't seen much use since sol 176. If you remember, MARDI stands for 'Mars Descent Imager' which is located on the rover's front left underside. It captured spectacular images of Curiosity's descent towards the floor of Gale crater during landing last year in August.
Because it lacked a proper lens cover or similar protection like the other cameras it, MARDI's lens ended up covered in a fine layer of Martian dust kicked up by the rover's rocket-powered landing system and has since been producing hazy images. But now the decision has been to use the camera to document the changes in terrain texture. Images captured in twilight conditions have been shown to result in good contrast images without much light scattering from the dust coating the lens.
 |
| Map showing Curiosity's progress up to sol 329 (NASA/JPL/UA) |
 |
| Engineering diagram showing where MARDI is located (NASA/JPL) |
Because it lacked a proper lens cover or similar protection like the other cameras it, MARDI's lens ended up covered in a fine layer of Martian dust kicked up by the rover's rocket-powered landing system and has since been producing hazy images. But now the decision has been to use the camera to document the changes in terrain texture. Images captured in twilight conditions have been shown to result in good contrast images without much light scattering from the dust coating the lens.
 |
| Two MARDI shots comparing the change in terrain texture. From layered terrain to a rocky plain (NASA/JPL/MSSS/Abraham Samma) |
MAHLI is also being utilised for the same purpose. That seems to have been the only major activities this past week, interspersed with imaging with the colour Mastcams and long drives bordering 40m or so.
 |
| Sol 329 navigation mosaic showing Glenelg and two sets of tracks. The right are new and the left are old ones made last year leading to Rocknest where Curiosity scooped (NASA/JPL/Abraham Samma) |
Finally, I'd like to share another brilliant video from JPL that summarises pretty much everything plus explains a little more about how Curiosity is making its towards the western ingress point. Enjoy and stay curious!
Monday, July 8, 2013
Sol 327: Shaler ops accomplished. Off to Mount Sharp!
It's now half past five in the evening of sol 327 of Curiosity's mission at Gale crater, Mars. Last week the rover was busy doing contact science on a rock called 'Shaler' with it's arm instruments.
On sol 324, Curiosity switched to reverse gear and back up from Shaler.
On sol 327 the rover performed another drive which takes it further down the path to Mount Sharp's base. It will take a long while (maybe even a year) to get to the mountain and that will depend on how many other targets Curiosity will have to check out that the science team find interesting. This ain't Formula One for sure!
The Mastcam's (the science cameras that attached to the top of the camera mast alongside the navigation cameras and the laser-shooting ChemCam) right eye (100 mm) was used on sol 323 to take wonderful shots of part of the dark dune field near the base of the mountain where you can also see layered rock exposures which might be contain the coveted clay minerals like smectite which usually form only in the presence of liquid water. I have stitched them into a mosaic. Click the mosaic to biggify!
 |
| Front Hazard Avoidance Camera image taken on sol 323 showing contact science done on Shaler (NASA/JPL) |
 |
| MAHLI image taken on sol 323 showing Shaler's scalloped and pitted surface. (NASA/JPL/MSSS) |
 |
| Navigation camera image taken on sol 324 after the short reverse drive from Shaler (NASA/JPL) |
The Mastcam's (the science cameras that attached to the top of the camera mast alongside the navigation cameras and the laser-shooting ChemCam) right eye (100 mm) was used on sol 323 to take wonderful shots of part of the dark dune field near the base of the mountain where you can also see layered rock exposures which might be contain the coveted clay minerals like smectite which usually form only in the presence of liquid water. I have stitched them into a mosaic. Click the mosaic to biggify!
 |
| Mastcam right eye mosaic showing part of the dark dune that the rover team wishes to avoid and dark outcrop exposures of ancient rock at the base of the mountain (NASA/JPL/MSSS/mosaic by Abraham Samma) |
Wednesday, July 3, 2013
Catching up on sol 322 (2.7.2013)
My, my what a busy month this has been for me! Fieldwork in the middle of nowhere and exams (and plenty more heading my way! Yikes!). But that's science for you. Tiring but always a joy to perform. Just like our intrepid rover and her hardworking team!
Speaking of which, this just leaves me with 34 sols worth of adventure to review! We last left her when she was wrapping up analytical work at the Cumberland work area.
Afterwards, it was announced in a press release on June 6 that the team will now focus on long distance drives that will take the rover nearer to the mission's intended target; Mount Sharp aka Aeolis Mons. However that doesn't mean that all side shows will be ruled out for close examination. Anything that seems worth the time might be examined. Hence, it is difficult to tell when the rover will start treading the slopes of the mountain.
Departure from the Glenelg area took place on sol 295 starting with a 6.13m drive. Another drive followed 2 days later totaling almost 20m. The next few sols included lots of 2m drives up to sol 301 when the rover finally reached an intended target of investigation; Point Lake.
Point Lake is quite interesting because the rocks don't seem to be as straightforward as first impressions suggest. On the one hand the rocks contain holes, suggesting vesicular basalt rock i.e. igneous rocks. On the other hand there are signs that suggest a sedimentary history including raised rims in some of the holes and a cluster of pebbles at the bottom of the step-like outcrop that may be have been eroded out of the parent rocks, leaving the tell-tale holes.
The sedimentary picture becomes clearer at the bottom of the outcrop which seems to be softer than the upper portion of the outcrop. It could be basalt overlying sedimentary rock, who knows?
The next few sols were dedicated to arm work on the rover which was a little complicated because of the orientation of the outcrop. Nevertheless, the rover did manage to conduct excellent MAHLI imaging of the Point Lake rocks.
Afterwards, the rover logged around 68.65m and reached another outcrop called Shaler on sol 317 which is actually my personal favourite because of its fine layerings. It was passed over back then on sol 120 on the way to Yellowknife bay but now the science team appear to have reached a decision that Shaler requires more study.
Shaler is said to have more evidence to support the prevailing view that an ancient stream may have existed in the rover's immediate area of study in the remote past. So examining it now will definitely produce good science. Arm activity has been scheduled for the next few sols (though there could be one day of delay due to concerns about the rover's stability for arm deployment) including MAHLI imaging of Shaler which should be coming down even as I write this review. The APXS instrument will also be in use during this period. Shaler is expected to be the last stop before the rover starts trekking to the 'entry point' into Mount Sharp. The entry point lies a few kilometres away from the rover because the team wishes to avoid any unnecessary contact with the black sand dunes that hug the slopes of the mountain that may hamper the rover's progress if not hinder it completely.
And that's it I guess for the review. I've certainly gotten myself up to speed and I hope you have too dear readers. Stay curious!
 |
| My colleagues and I in the town of Mpwapwa central Tanzania posing for a shot after completing medical fieldwork (credit: Monica Shayo) |
 |
| A computer model of Curiosity depicting its sol 274 position next to Cumberland (NASA/JPL) |
Departure from the Glenelg area took place on sol 295 starting with a 6.13m drive. Another drive followed 2 days later totaling almost 20m. The next few sols included lots of 2m drives up to sol 301 when the rover finally reached an intended target of investigation; Point Lake.
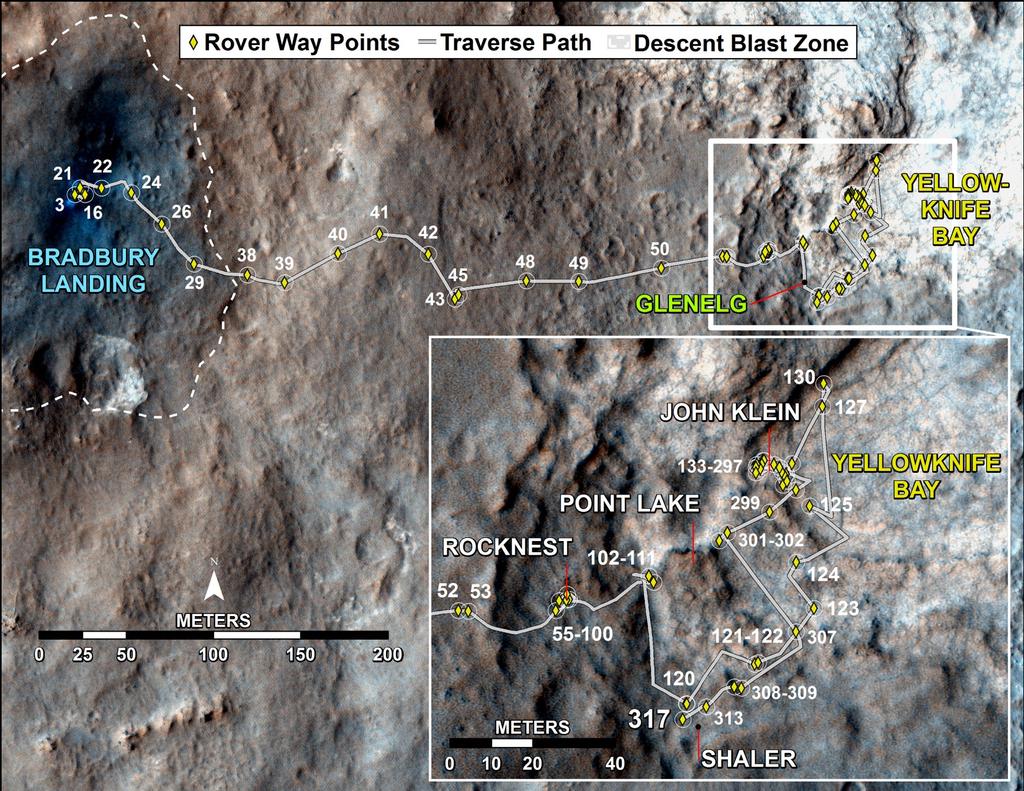 |
| A map showing the progress made by Curiosity up to sol 317 (NASA/JPL/UA) |
 |
| Sol 317 navigation mosaic of Point Lake (the cliff-like outcrop to the left side) (NASA/JPL/mosaic by Abraham Samma) |
 |
| A mosaic showing details of Point Lake. The image has been white balanced to make the scene appear as it would if it were shot on Earth. The scale bars are 50cm. A full resolution version is here. (NASA/JPL/MSSS) |
 |
| MAHLI image taken on sol 303. The lens of the camera was positioned no closer than 15cm away from the rock face. Notice the holes some of which appear to contain eroded out pebbles. (NASA/JPL/MSSS) |
 |
| A white balanced mosaic showing Shaler. The images were taken by the rover during sol 120 (NASA/JPL/MSSS) |
 |
| Sol 317 Mastcam left eye view of Shaler's layers (NASA/JPL/MSSS/mosaic by Abraham Samma) |
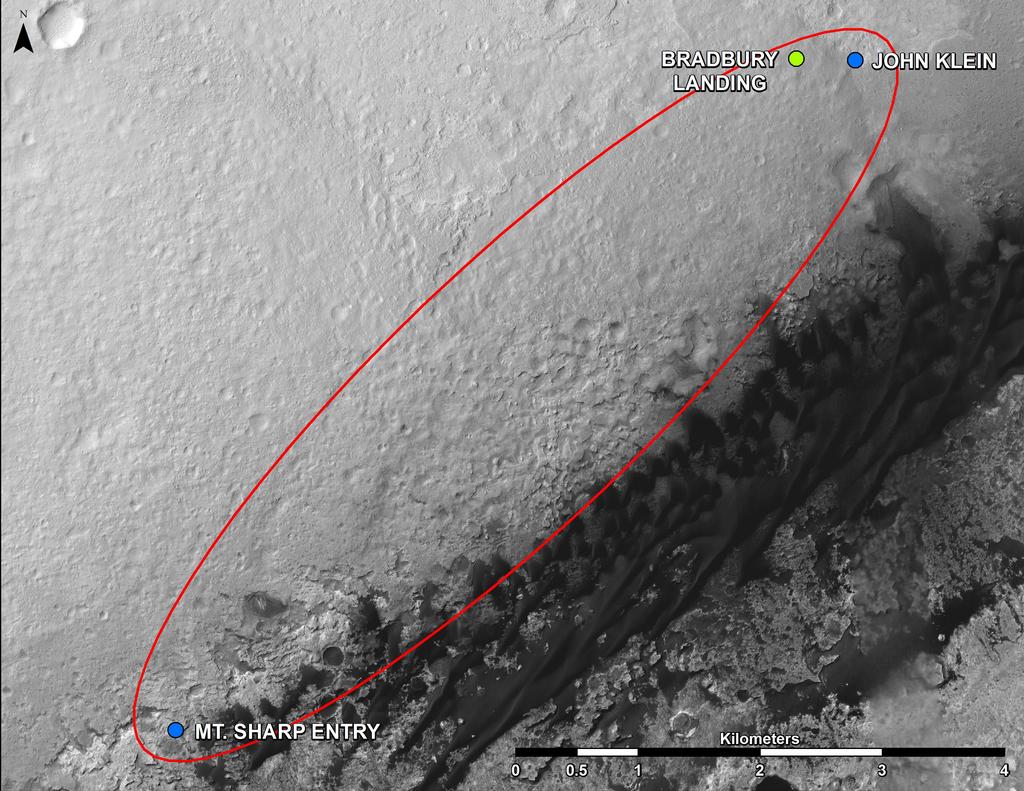 |
| Orbital image from MRO's CTX imager showing the area (area within the red ellipse) Curiosity will probably traverse before it gets to the entry point onto the slopes (NASA/JPL/UA) |
Wednesday, May 29, 2013
Sol 288: Press release tomorrow (30.5.2013)
 |
| Radiation Assessment Detector on Earth. The instrument can detect high energy particles which reach the Martian surface from various sources including the sun. (Commons) |
-- Donald M. Hassler, RAD principal investigator and program director, Southwest Research Institute, San AntonioAs usual, you can listen in to the press conference tomorrow starting from 1830 GMT on JPL's ustream channel or from NASA audio.
-- Cary Zeitlin, principal scientist, Southwest Research Institute
-- Eddie Semones, spaceflight radiation health officer, NASA's Johnson Space Center, Houston
-- Chris Moore, deputy director of advanced exploration systems, NASA Headquarters, Washington
Meanwhile on Mars, Curiosity has fed samples into the analysis instruments SAM and CheMin from the recently drilled rock dubbed Cumberland. We shouldn't expect anything new (though there may be yet another surprise of a discovery) because the rock is more or less similar to the previous drilling target. If anything, this one will help improve the previous measurements of the other rock, hence the similarity of targets is by design.
Monday, May 27, 2013
Mars Science Laboratory: Time Lapse - Sol 0 - Sol 281
I noticed this video on my twitter feed but completely forgot to talk about it here! And that's really bad because its so cool!
Using front hazard avoidance camera images, Karl Sanford made a wonderful time lapse video of Curiosity's entire journey in Gale crater since touching down in August last year. Its another example of how making data open allows ordinary citizens to engage with an incredible scientific missions and in the process, help to sensitise people about the science, exploration and inquiry. Brilliant!
Using front hazard avoidance camera images, Karl Sanford made a wonderful time lapse video of Curiosity's entire journey in Gale crater since touching down in August last year. Its another example of how making data open allows ordinary citizens to engage with an incredible scientific missions and in the process, help to sensitise people about the science, exploration and inquiry. Brilliant!
Tuesday, May 21, 2013
Sol 280: Drilling Cumberland
Yestersol (sol 279) was drilling day and once again the rover's tool has got obtained another sample of Martian rock. Truly astonishing! MAHLI images were taken of the drill hole afterwards. Here is one below:
A neat blinking image showing the before and after drilling scenes helps to give an idea of how much shaking is actually involved. Notice the changed positions of pebbles and gravel in the image below.
Judging from the image timestamps on the raw imagery site, I estimate the time to drill took no more than 30 minutes. Below is another gif animation of the entire day of activity for sol 279 as viewed by the right eye of the front hazard avoidance cameras. You'll notice the drill as a 3 pronged looking device with the 2 side prongs contacting the surface for stability during drilling. The prong in the middle is the drill head itself which also doubles as a core sampler for sampling the material collected by the drill threads. This sample will later on be given to the analytical instruments CheMin and SAM for further analysis.
 |
| MAHLI view of the drill hole (NASA/JPL/MSSS) |
 |
| Sol 275 compared to sol 279 view (NASA/JPL/MSSS) |
 |
| A day on Mars with Curiosity. Observant readers will notice that at some point in the animation the rover looks like it has been lifted slightly by the way the frame shifts upwards. This occurs due to the amount of downward force applied by the robotic arm on the rock in order to maintain stability during drilling. Thus the rover is lifted slightly as a result. (NASA/JPL/animation by Abraham Samma) |
Saturday, May 18, 2013
Sol 277: The Inspection of Cumberland
Another bump of not more than 1m and the rover is now bearing down on Cumberland.
The plan currently includes detailed surveys of the new target with the hand lens imager MAHLI to see if it is suitable for drilling. The MAHLI image shows nodules called concretions which are precipitates of minerals formed in watery conditions.
Sol 277's activities included atmospheric analyses performed by the SAM instrument as well as pre-conditioning the instrument for the anticipated reception of the new sample of drill material. The sample acquisition operation is expected to begin next week.
It's now the evening of sol 277 as of this writing.
 |
| Sol 275 view showing arm activity being conducted over the target Cumberland (NASA/JPL) |
 |
| Sol 275 MAHLI view of the nodular surface of Cumberland in true colour (NASA/JPL/MSSS) |
 |
| 'Cumberland' as imaged by the Mastcam on sol 275 in true colour (NASA/JPL/MSSS/mosaic by Abraham Samma) |
Tuesday, May 14, 2013
Sol 273: Facing Cumberland
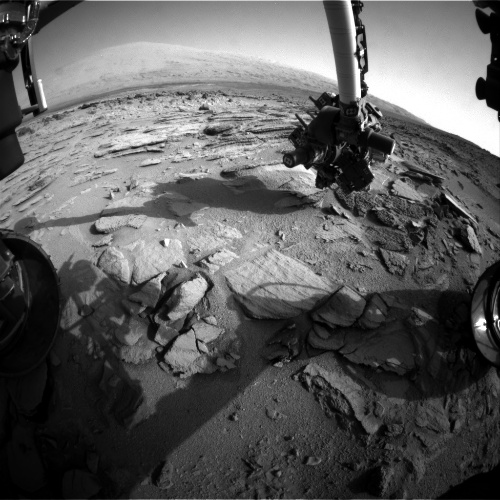
Sol 272's (12 May) drive has positioned the rover just in front of its new drilling target dubbed Cumberland. The small bump covered 2.05m lasting 14 mins.
Before this drive was accomplished, a flurry of science ops were done including MAHLI views of the John Klein workspace, APXS activity and some laser shots of targets by the ChemCam instrument. All these arm and remote sensing operations had to be squeezed into a work span of just 1 day; from sol 270 to 271. Sol 272 was dedicated to driving and assessment of the drive by engineering cameras. There might be another drive to better position the rover in front of Cumberland. But for the time being, we are here!
 |
| Sol 272 view front hazard camera shows the general view of the Cumberland workspace. John Klein is in the midground, left side. (NASA/JPL) |
 |
| Sol 270 MAHLI view of the drill hole at John Klein. Notice the laser scorch marks made by ChemCam along the side of the hole facing the camera plus the white sliver of gypsum veins (NASA/JPL/MSSS) |
Saturday, May 11, 2013
Sights on Cumberland
As you know, the rover Curiosity has exited the period of solar conjunction which was characterised by low science returns. As of now the rover has finished booting into its new software which includes better auto navigational capabilities which allow the rover to navigate most routes pretty much on its own without intervention from Earth (see the video update at the end of this blog post).
The new target for drilling has been chosen. Dubbed 'Cumberland', the target features numerous features typical of the wet ancient environment that has been the subject of much of the mission's time this past few months. Among the features you may notice is little round concretions that have resisted erosion and stick out of the rock like weird raisins. These are actually concretions; minerals that may have precipitated out of liquid water in the remote Martian past. You can also see thin white cracks. These are gypsum veins which also imply a watery history at least at Curiosity's location.
The new target lies west of the rover's current location. A small 'bump' is all it will take to reach as it is fairly close by.
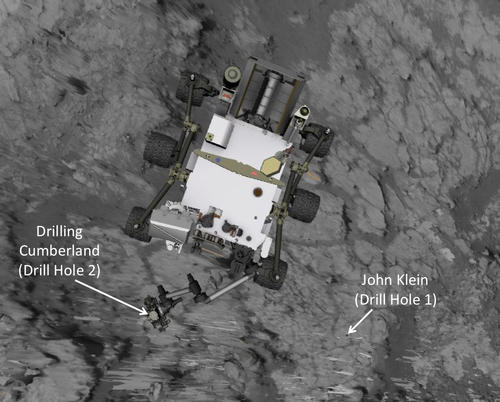
At Cumberland, it'll be all about drilling! But some of you may note; why is the rover targeting a rock that, by all accounts, looks exactly the same as the previous one i.e. John Klein. The recent news report on the mission home site explains:
The new target for drilling has been chosen. Dubbed 'Cumberland', the target features numerous features typical of the wet ancient environment that has been the subject of much of the mission's time this past few months. Among the features you may notice is little round concretions that have resisted erosion and stick out of the rock like weird raisins. These are actually concretions; minerals that may have precipitated out of liquid water in the remote Martian past. You can also see thin white cracks. These are gypsum veins which also imply a watery history at least at Curiosity's location.
 |
| A white balanced image taken on sol 192 showing Cumberland. The image was taken with the 100mm right mastcam eye. Note the 10cm scale at the bottom of the image. (NASA/JPL/MSSS) |
 |
| Map showing the location of John Klein and Cumberland. North is up (NASA/JPL/Univ. of Arizona) |
This second drilling is intended to confirm results from the first drilling, which indicated the chemistry of the first powdered sample from John Klein was much less oxidizing than that of a soil sample the rover scooped up before it began drilling.The first drill sample may have had some contaminants from all the previous scoopings of Martian soil. Therefore it only seems proper to take yet another sample of the same rocktype from a different locality and compare the findings with the hope that whatever contaminants there are are now likely from a similar rocktype. The results will be more refined and trustworthy.
Friday, May 3, 2013
Sol 262: Conjunction over!
Conjunction is over! Communications have been re-established and after such a long hiatus, I think we're in need of a recap.
The rover Curiosity is currently parked besides an outcrop dubbed John Klein, the site of the mission's first drilling. Plenty of science was accomplished along with some samplings taken for analysis in the SAM and CheMin instruments from the drill hole.
Now what is the rover going to do? The mission team announced during the beginning of conjunction that they will decide on a new drilling target over the period of conjunction. But right now science ops are taking a back sit so that mission engineers can upload new flight software for the rover according to the USGS's mission update. This could take about a week to verify (brain transplants are always a tricky thing to do whether you're dealing with a human or a machine!). Let me leave you with this panorama taken a day after operations resumed on sol 261 (that was May day) by the rover's navigation cameras.
The rover Curiosity is currently parked besides an outcrop dubbed John Klein, the site of the mission's first drilling. Plenty of science was accomplished along with some samplings taken for analysis in the SAM and CheMin instruments from the drill hole.
Now what is the rover going to do? The mission team announced during the beginning of conjunction that they will decide on a new drilling target over the period of conjunction. But right now science ops are taking a back sit so that mission engineers can upload new flight software for the rover according to the USGS's mission update. This could take about a week to verify (brain transplants are always a tricky thing to do whether you're dealing with a human or a machine!). Let me leave you with this panorama taken a day after operations resumed on sol 261 (that was May day) by the rover's navigation cameras.
 |
| Navigation panorama taken on sol 262 (NASA.JPL/panorama by Abraham Samma) |
Monday, March 25, 2013
Sol 225: Science ops continue
Finally, Curiosity's beaming back science data again! Hooray!
Of course one of the first things that happens after such prolonged episodes without any data returns is to take images for vehicle orientation verification. This will allow scientists and engineers on Earth to quickly assess the rover's position especially arm position, see if other data sources follow and thereafter plan their next move. They do this with the navigation cameras which shoot in black and white and are mounted 2m above the ground alongside the colour science cameras.
More samples of John Klein are planned to be processed for SAM to refine the measurements presented to us 2 weeks ago. Conjunction will slow things down for the time being but with a working B-side computer and a restored A-side as back up, Curiosity is set to restart her mission of exploration. Let's roll!
 |
| Sol 215, one of the first images beamed back from Curiosity about fifteen days after sol 200's anomaly happened. The view was shot by the lower-mounted front hazard avoidance cameras (right 'B' eye) and shows 'John Klein' in the foreground with Aeolis mons in the distance. (NASA/JPL) |
 |
| Sol 223 360 degree navigtion mosaic panorama. It was a rough set up so forgive the saw-like horizon though that isn't the point of this image as explained above (NASA/JPL/panorama by Abraham Samma) |