Just to recap the Curiosity rover is now tucked away in its aero shell connected to the cruise stage which is powered by solar panels and has recently begun charging the rover’s batteries at 100% for the coming rigours of entry, descent and landing or EDL. The scientific instruments are all off except for the rover’s radiation assessment detector or RAD which was left on for most of the cruise to Mars to measure radiation levels inside the aero shell capsule until recently.
 |
| Anatomy of the space craft: 1. Cruise stage 2. Back shell 3. Descent stage 4. Rover 5. Heat shield 6. Parachute canister (NASA/JPL) |
Eight months and more than 500 million kilometres of travel
later, NASA’s MSL Curiosity rover is about to begin a new chapter in its life;
slowing down and making a soft landing on the surface of Mars in Gale crater on
a plain called Aeolis planum besides the awesome Mount ‘Sharp’.
 |
| Gale crater with Curiosity's landing site in yellow ellipse (NASA/JPL) |
But hey, we have to slow down. From 5.8km/sec (approx
21,000km/hr) to effectively full stop. And this will all take place in 7minutes
hence the phrase ‘7 minutes of terror’. Sounds hard? You don’t know the half of
it. The engineers behind the art of slowing down speeding spacecrafts have done
their homework. But even so they have to be sure of themselves and their
vehicle. They have performed plenty of software checkouts and all the protocols
needed to verify the vehicle will perform as expected on landing day. By then
the spacecraft will be on its own and it will be up to its RAD750 processors to
get Curiosity to the surface intact. All NASA will be able to do is listen to
radio signals relayed back to Earth (the radio signals will take around 14 minutes to reach Earth) by Martian orbiters already there (2
American orbiters and 1 European one) that will tell them what’s happening to
the vehicle. Nothing more than an ‘I’m alright and doing so and so’ beacon.
Talk about pressure!
So what is the spacecraft up against? As I have said the
rover needs to slow down. The best way to shave off excess speed is to use the
planet’s atmosphere. After jettisoning the cruise stage and orienting itself
correctly the spacecraft enters the Martian atmosphere and at an altitude of
about 125km the friction that develops between the fast moving spacecraft’s
surface and the alien air around it starts to produce heat. The heat is so intense
(more than 1200oC) that plasma is formed around the spacecraft which
is a fourth state of matter (besides solid, liquid and gas). It consists of
atoms stripped of their electrons; a soup of ions! And where there are charged
particles there is a problem of communication. The spacecraft will enter a
radio blackout for a while and hopefully emerge without a hitch. At this point
the speed of the spacecraft has been reduced to 470m/s.
Since the first attempt at landing on Mars, ablative shields
have been used to protect the spacecraft from the hot gases of atmospheric
entry. Curiosity’s ablative shield is the largest kind ever flown in to space
with an incredible diameter of 4.5m!
 |
| Curiosity's Heat shield. Note man for scale. (NASA) |
The material used is called PICA (Phenolic Impregnated
Carbon Ablator) developed in the 1990s by NASA Ames Research Centre which has
the advantage of being lighter than previous materials used. It is also a more
efficient ablative in that it is better at directing (not by conduction; its
thermal conductivity is poor) heat away from the area of peak heating.
During the entry phase a set of experiments called the Mars
Science Laboratory Entry, Descent and Landing Instrument (MEDLI) suite, located
on the heat shield, starts taking measuring atmospheric properties and heat
shield performances to allow for the creation of better heat shields for future
missions.
After the spacecraft is out this phase of its mission (called
the entry interface) it will be do something never before done on another
planet. Curiosity will guide itself throughout entry using a technique that was
also used during the Apollo moon programs. Previous missions would have been at
the mercy of the atmospheric conditions and in fact the spacecrafts would
always overshoot the centre of their landing ellipses (which I will talk about
in later posts). Now Curiosity will be calling the shots using a combination of
tungsten weights and thrusters. To make it easier to change the orientation of
the aero shell of the spacecraft in the atmosphere a series of weights are
released in order to offset the centre of gravity. Any deviation from the path
of entry is sensed and corrected by use of the thrusters and the spacecraft is
steered towards the landing site. This phase is called the hypersonic aero-manoeuvring.
Hypersonic includes speeds greater than five times the speed of sound.
Afterwards six more weights are jettisoned to realign the centre of gravity
back as the descent phase starts.
When the speed lowers to approximately 409m/sec or Mach 2
the parachute is deployed at an altitude of about 11km. The spacecraft senses
movements as it falls through the atmosphere by using inertial measurement
units. The parachute’s design is basically a scaled-up version of the Viking
landers’ disc-gap design parachutes which had a diameter of 16.15m. Curiosity’s
is 21.5m wide and is the largest parachute to be flown to Mars yet. The design offers good stability although the
engineers seem unable to remove a phenomenon called ‘parachute area
oscillations’ where the parachute shakes noticeably during speeds above 1.4
times the speed of sound or Mach 1.4, bringing in unwanted excesses in stress.
Their recommendation; spend as little time as possible above this speed.
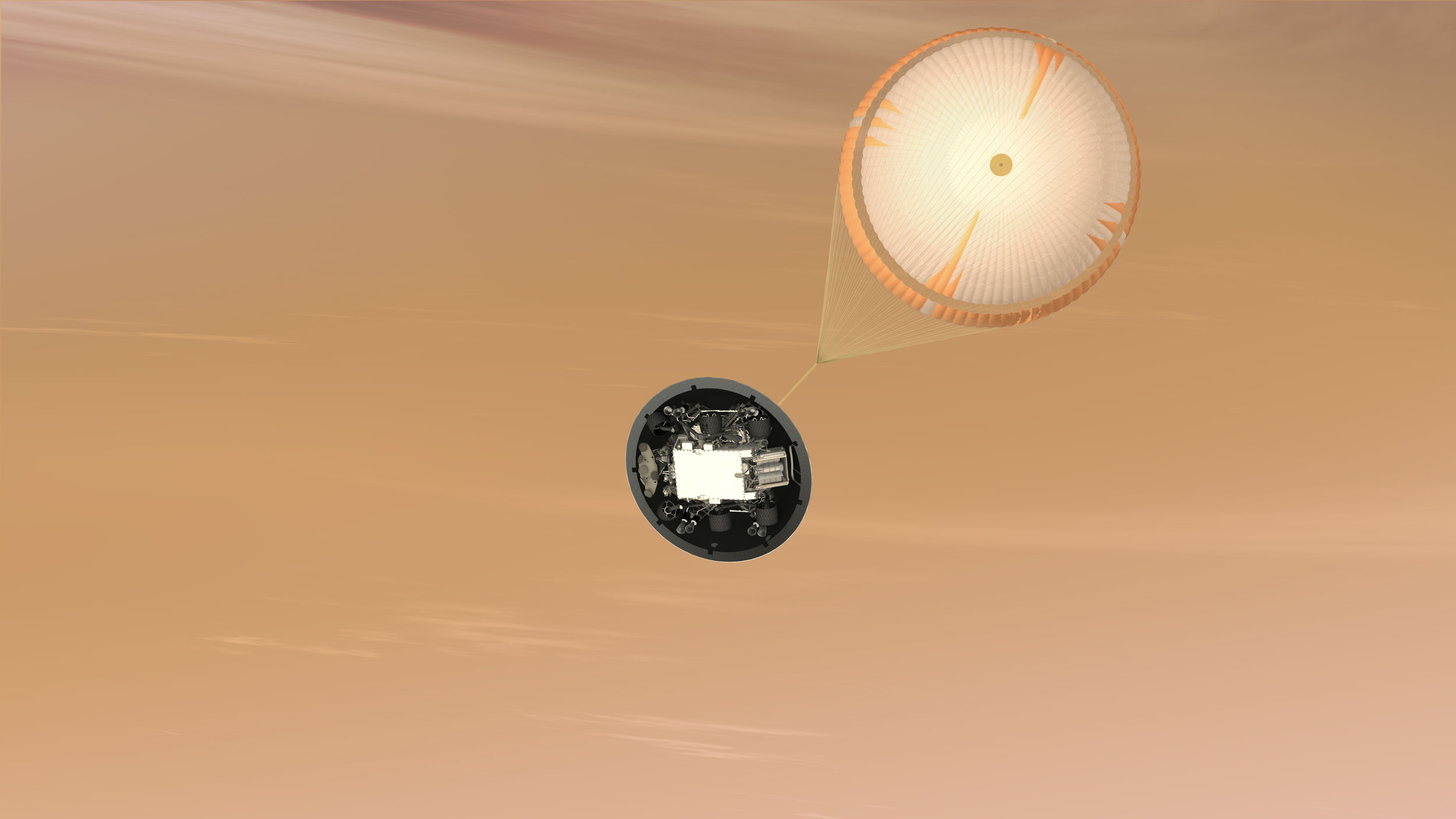 |
| Artist depiction of Curiosity's parachute deployed minus the heat shield (NASA/JPL) |
The parachute cuts down the speed of descent from 450m/sec
down to about 100m/sec. This is a safe enough speed to release the blackened
heat shield which is no longer required at that speed. At this point the rover
is at an altitude of 8km. The underbelly of the actual rover is now exposed to
the Martian air for the first time. Attached to the front corner of the rover
is a colour camera called the Mars Descent Imager or MARDI begins to take video
of the ground below at a rate of 5 frames per second for 2 minutes. It will
store the 1600 by 1200 pixel images for later transmission in an 8 GB buffer memory.
The most recent successful Mars lander the Phoenix mission, which was sent to
an area of Mars near the northern polar ice cap in 2008, had a similar
instrument onboard but was never used amid concerns that it would have hampered
communications during the critical moments of landing. So I’m excited to see
what kind of footage we’ll get this time around!
 |
| Photo of MARDI (NASA) |
The descent stage, holding the rover, is still attached to
the back shell and parachute. It begins to collect information on the
spacecrafts horizontal and vertical velocities by means of a radar system
attached to it. Later at a height of around 1.4km the descent stage with the
rover detach from the back shell and parachute and enter free fall for less
than a second! Good thing the rover does not suffer from vertigo because we
need to light some fuses! Retrorockets fire up and the rover now enters powered
descent phase. Meanwhile the backshell and parachute shoots ahead of the
descent stage above it as the rockets kill off all horizontal motion. The
rockets’ thrust can be varied from a total thrust of 3200N to 24,800N. Vertical
velocity comes down to 20m/s from the 125m/sec at separation. This the constant
velocity maintained until an altitude of 55m is reached where there is now
constant deceleration to a minimum of 0.75m/s or 2.7km/hr which is quite. At an
altitude of 21m while maintaining that new velocity 4 of the engines shut down
to minimise blowing dust on the surface. The engines that remain on all have
their nozzles pointed slightly outwards. This again is to minimise the amount
of blown up dust around the rover’s immediate vicinity at touchdown.
Now comes the tricky part so far; powered descents in Mars
landings is nothing new and has been in use since the 1960s. What is unusual is
how the rover’s delivery system is designed. The sky crane system has never
been used before and seems to freak out everyone (I know it does I mean look
at below!)
 |
| Descent stage lowering Curiosity in sky crane manoeuvre (NASA) |
But don’t you think for one seconds that the chaps at NASA
just made it to show off (they can’t afford to play around with a 2.5 billion
dollar mission). Consider that the rover is the biggest, ever. It weighs almost
a tonne. And if you try landing it the old fashioned way you run in to problems
not excluding weight for cost issues as well as engineering issues. It’s too
big full stop. So think smart; rover’s wheels and bogie system become a landing
platform and lower it with a crane attached to the descent stage. Simple AND
well tested they assure us! Then again it’s never been done before and gremlins
can exact revenge at any time. An element of luck is at play among us I guess.
The rover is detached from the descent stage and is lowered
at the end of bridles and an umbilical cord that allows communications between
the vehicle and the descent stage. The wheels and bogie system also deploy at
this stage all occurring at 20m above the surface. Slowly the rover is lowered
to the ground and at contact the whole thing freezes for a few second to verify
loss of downward forces acting on the descent stage due to the weight of the
rover. After that the bridles and cords are cut and the descent stage flies out
of the way to fall at least 150maway from the rover. And that will mark day one
or Sol 0 of surface operations!
There are a lot nitty gritty details that I have left out so
for all you fellow geeks out there here are highly recommended readings for
whenever you have time to burn:
- http://mars.jpl.nasa.gov/msl/news/newsroom/ Plenty of press material here that are informative by themselves.
- http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20090007730_2009006430.pdf Very good reading for the ones who think the stuff above is still not enough.
Next time I’ll concentrate more on the landing site and see
why the heck Gale crater would appeal to the mission planners and scientists
alike. 10 days left as of this writing! If you would like to see where the
rover is right now click here!
 |
| Overview of the EDL process (NASA) |
No comments:
Post a Comment