Curiosity is fast approaching Glenelg and should make landfall
within the next few days thanks to the boost in mileage from the sol 49 drive
which produced 42m of covered distance, the rover’s longest single drive yet.
Subsequent drives till sol 52 put the rover’s total mileage at the 0.45km mark.
The rover, given its abilities and advanced designs, can do
better than 42m. But engineers are still assessing the rover’s progress but
this recent drive shows their increasing confidence in the rover’s mobility
system. The rover is designed to go 20 km during its prime mission which should
last 1 Martian year; equivalent to roughly 2 Earth years.
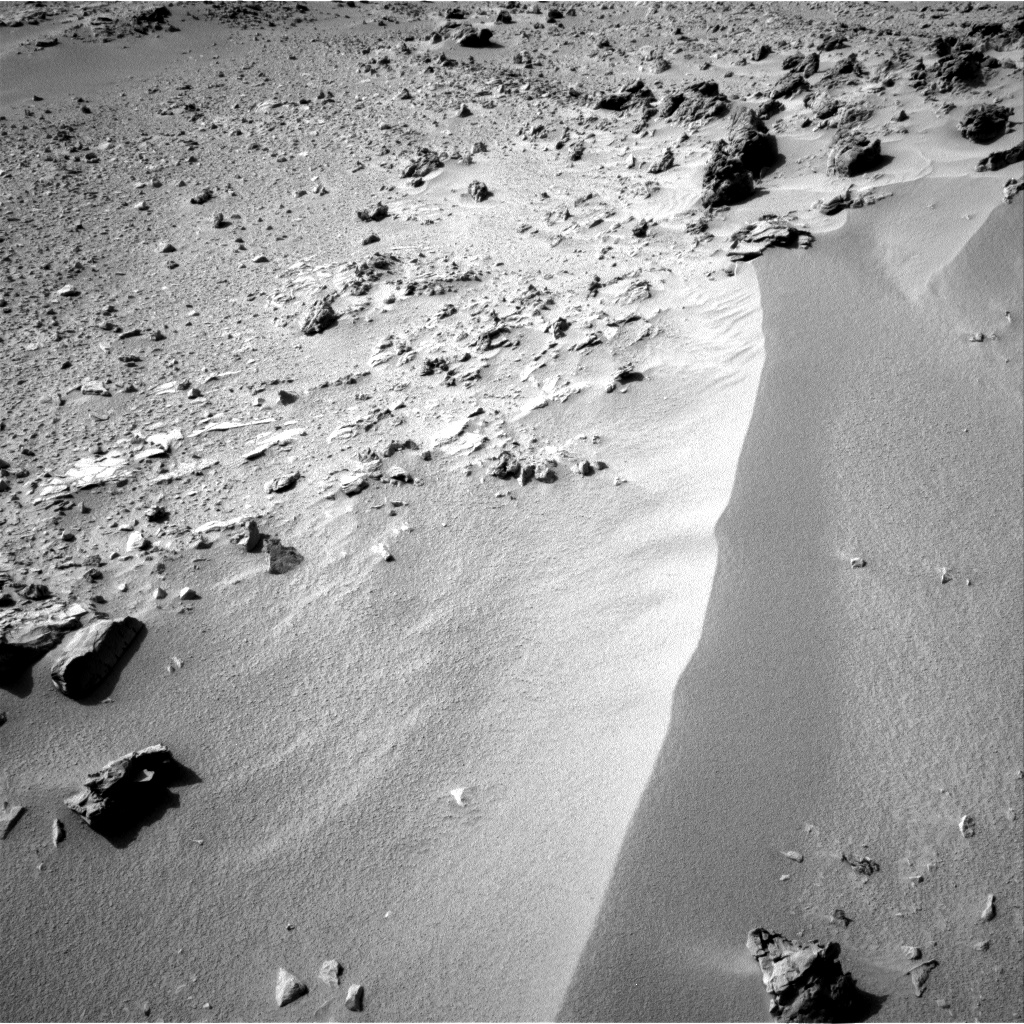
 |
| Sol 52 navigation view shows a change in scenery with lots of layers as we approach Glenelg in the distance (centre) (NASA/JPL/mosaic by me) |
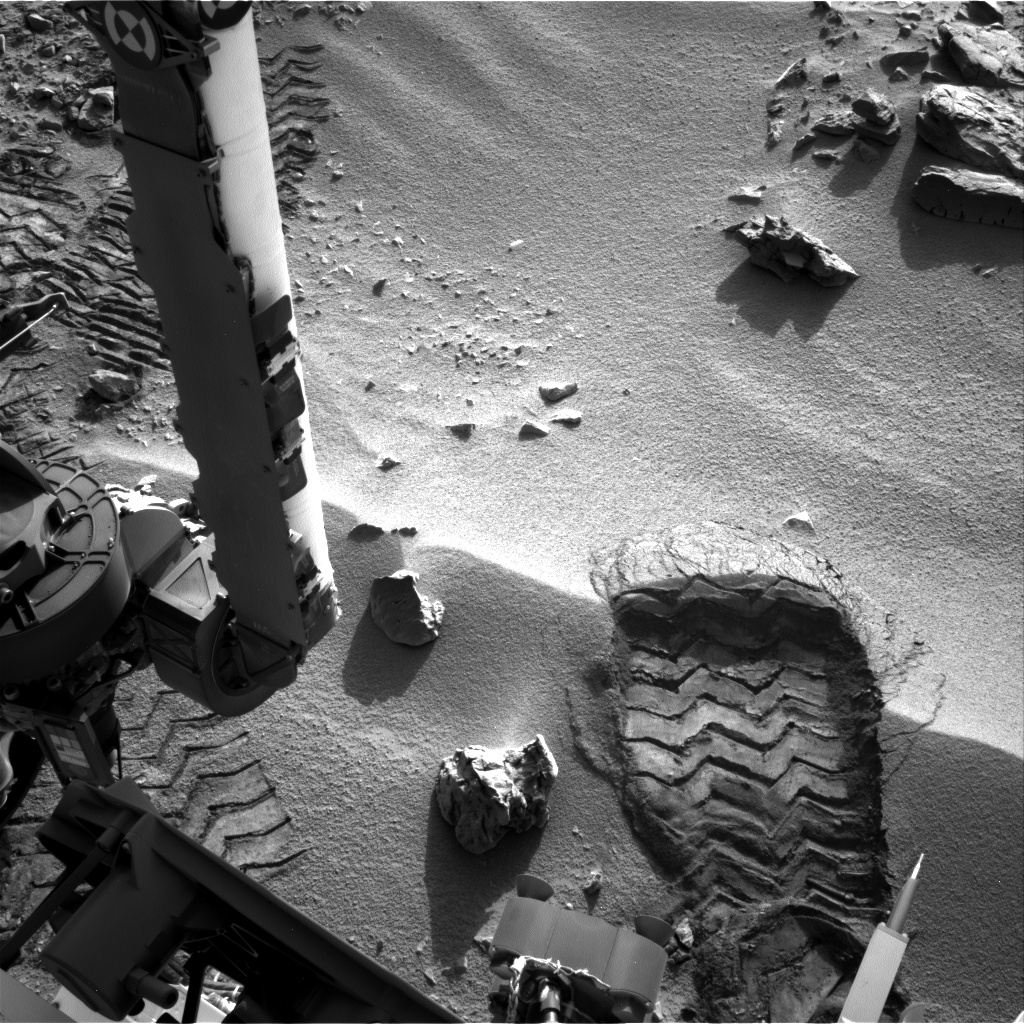
The for the past few days beginning sol 50 was to examine
for areas near the rover’s current position that can allow the rover to test
out its CHIMRA tool which is located at the end of its arm and will be used to
process soil and core samples by crushing and sorting out the grains before
depositing them in to any other experiment package. Nearby drifts like this one
the rover parked adjacent on sol 55 to might make good targets:
 |
| Sol 55 navigation camera view (NASA/JPL) |
One of the main reasons for this exercise is to clean up the instrument's insides which may or mayn't still contain microbes/materials from Earth which will affect the samples. Passing Martian dirt into CHIMRA serves as a sort of 'high fibre diet'. Yep, even Curiosity needs fibre!
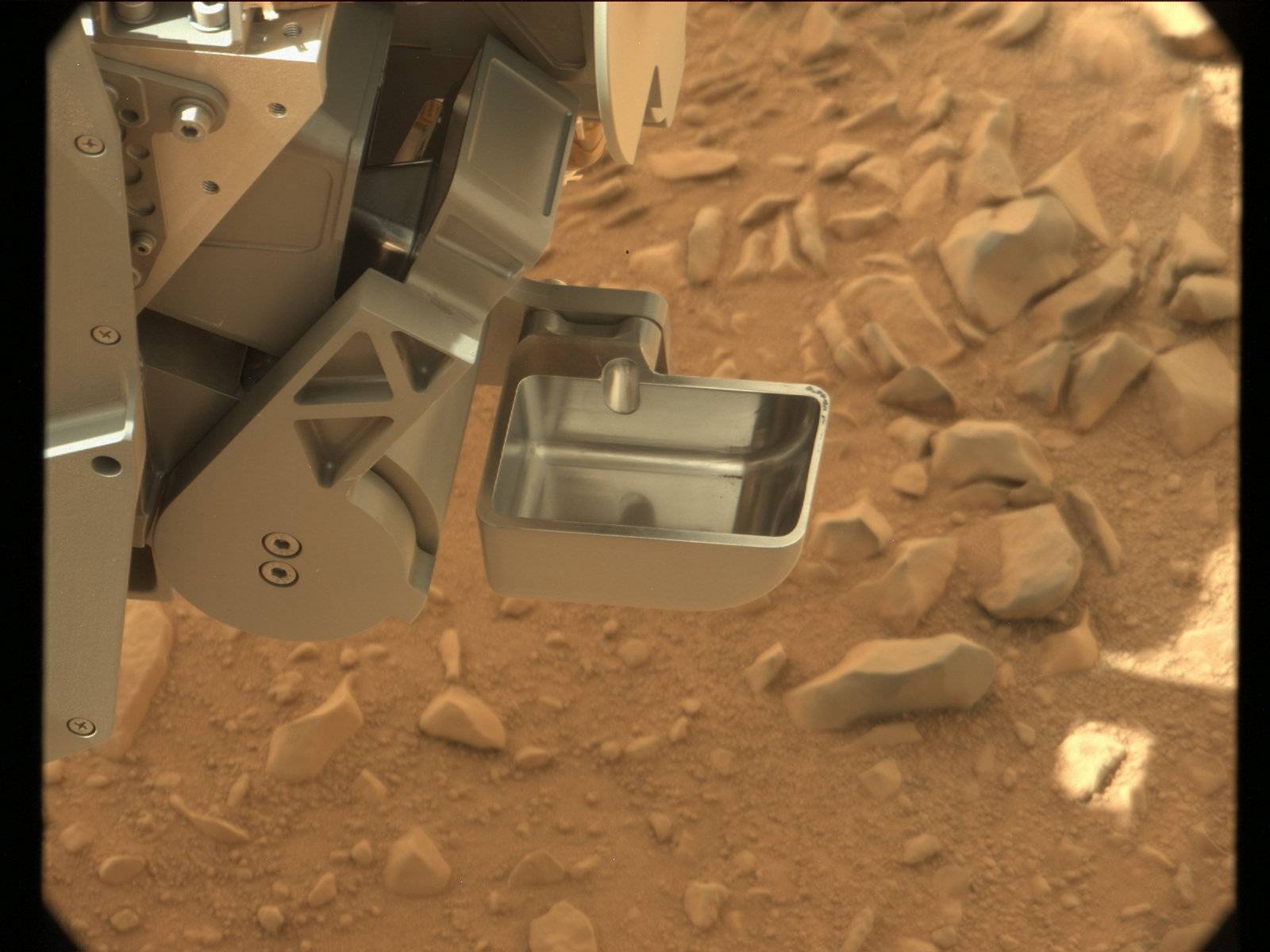 |
| CHIMRA's scoop in colour on sol 51 (NASA/JPL/MSSS) |
The rover examined a nearby rock on sol 54 with its
Mars Hand Lens Imager (MAHLI) and the Alpha Particle X-ray Spectrometer (APXS).
 |
| Sol 54 arm work on Bathurst Inlet (NASA.JPL) |
The rock (dubbed 'Bathurst Inlet') in question appears (let me just say now that when
it comes to casual rock identification it is always good to take it with a
whole bag salt) to be basalt in nature, certainly not like the recent
conglomerates that hit the world’s headlines recently. MAHLI images show a shiny,
black rock with too-fine-to-see-with-naked-eye crystals coated with the
ubiquitous red dust:
 |
| NASA/JPL/MSSS |
If you visit the raw images page on the JPL site (the link
is in the overhead bar) you will notice that MAHLI produces grey images like
this one here:
 |
| Depth map or Z-map (NASA/JPL/MSSS) |
These are depth maps generated by Curiosity’s computers from
MAHLI constantly adjusting its focusable elements to see target better. These
give information on the distances of point in the scene from the
camera/viewer.
So that means we can toy around with these to produce 3-dimensional models of
MAHLI’s targets! A number of programs exist that you can download and use for
free on the web. I used ImageJ, a special tool that’s open and used by
radiologists especially to manipulate digital MRI images. The depth map shown
above belongs to the image below:
 |
| Sol 54 MAHLI image (NASA/JPL/MSSS) |
So by loading the map on to a platform that can interpret
the different shades of grey in it as distances and using the colour image as a
texture for the model, we get the following product:
Neat! A lot of things that didn't look obvious in 2d become
obvious with 3d. For those of you who would like to give it a try, you can
download ImageJ, a java based program which can also be used to make animations
like the one posted above
here. All documentations and how-to stuff are
available
here.
Before I sign out, let me draw your attention dear reader to
the links available in the sidebar below my twitter portal. These are
incredibly informative sites and blogs all about Curiosity and then some and if
you haven't seen any of them before and would like to experience more with this
mission of the decade, I encourage you to follow them up. Be part of the
adventure! The list will grow with time. Don't forget the ones in the overhead
bar above!